
【導讀】二十多年來(lái),電機電能效率一直是全球能源監管機構關(guān)注的重點(diǎn)。這是全球共同努力的一部分,旨在通過(guò)增加電能利用率以及使用可再生源發(fā)電,達到最大程度減少碳排放的目的。早期的電機效率法規是自愿的,但很快這些法規就變成強制性的了,并且每5至10年就會(huì )提高最低能效水平要求。
鼠籠式感應電機(SQIM)自人類(lèi)普及用電之后便一直是工業(yè)的主力軍,因為它在直接連接三相交流電源后便可開(kāi)始工作。當前的IEC標準依據功率額定值將這些電機的效率分為各種等級,范圍從標準效率(IE1)到超頂級效率(IE4)。今天,IE3頂級效率在世界上最大的工業(yè)區內是強制標準,這些地區包括歐盟、美國、中國和日本。廠(chǎng)商并沒(méi)有抗拒這一變化,因為在電機的壽命期間,電機的資本投入只是電費的一小部分。哪怕將頂級效率電機替換為15 kW超頂級效率IE4電機,其額外的成本也會(huì )在兩年內通過(guò)節約的電費收回。電機效率要求的這種趨勢迫使很多設備制造商拋棄直接離線(xiàn)電機,轉而使用基于逆變器的解決方案。這些解決方案的各種架構以及驅動(dòng)和信號隔離要求是本文所要討論的主題。
SQIM制造商目前為止一直將更為嚴格的法規視為市場(chǎng)機遇。頂級效率和超頂級效率電機的材料、設計、制造成本相比標準效率電機更高,但市場(chǎng)售價(jià)也更高。然而,最新的效率分類(lèi)等級IE5和IE6將對電機制造商造成不少困擾。電機專(zhuān)家相信,要設計線(xiàn)路連接式的SQIM來(lái)滿(mǎn)足高于IE4的效率等級——尤其是較低功率范圍(de Almeida)——將會(huì )是十分困難且成本高昂的。極有可能只有逆變器連接式電機才能滿(mǎn)足IE5或更高的效率等級。永磁同步電機(PMSM)通常用于超高效率應用,但稀土轉子磁體的成本和獲取性是個(gè)問(wèn)題。最新的軸向電機設計中使用鐵氧體磁珠或新的磁體材料,這些材料是為滿(mǎn)足不斷增長(cháng)的電動(dòng)汽車(chē)市場(chǎng)而開(kāi)發(fā),可緩解這些問(wèn)題。此外,人們正在考慮針對IE5效率等級驅動(dòng)(ABB)采用同步磁阻電機(SRM)。SRM既沒(méi)有轉子繞組也沒(méi)有磁體,能以較低的成本實(shí)現高效率,框架尺寸與同等功率額定值的SQIM相當。
逆變器和隔離
這種使用效率更高電機的趨勢推動(dòng)了基于IGBT的頻率逆變器需求,可將整流市電輸入轉換為驅動(dòng)電機的各種頻率電壓。逆變器控制型電機的輸出扭矩或速度經(jīng)優(yōu)化后匹配軸負載,可最大程度降低能耗和電機運行溫度,改善電機可靠性。此外,其附加控制功能有:狀態(tài)監控、功率計量和工廠(chǎng)網(wǎng)絡(luò )連接,可提高過(guò)程效率和可靠性。隔離技術(shù)是驅動(dòng)系統中的關(guān)鍵因素,因為它能安全地將控制器用戶(hù)界面與連接逆變器的危險高電壓相隔離。
有多種高等級因素會(huì )影響特定驅動(dòng)中的隔離要求和架構,這些因素包括:電機驅動(dòng)性能等級、通信接口的復雜性、控制器架構以及系統內的電壓水平,如圖1所示。

圖1. 電機控制架構
很多情況下,關(guān)鍵的隔離節點(diǎn)是柵極驅動(dòng)器和電機相位電流檢測電路。這兩處均涉及與開(kāi)關(guān)高電壓有關(guān)的控制或測量信號,并且至少包含某種形式的電平轉換,很多時(shí)候還包括隔離(功能隔離或安全隔離),以便施加或提取以地為參考的信號。
參見(jiàn)圖2中的概念圖;該圖描述了單個(gè)逆變器相位臂,并標出了高端柵極驅動(dòng)器信號和相位分流檢測信號的電平轉換和潛在的信號隔離要求。
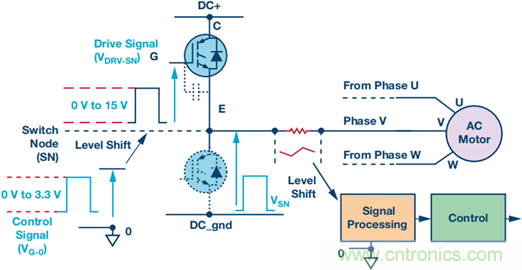
圖2. 三相逆變器臂參考信號
隔離式柵極驅動(dòng)器
由圖2還能看出一個(gè)隔離柵極驅動(dòng)器的基本要求,包括:邏輯電平開(kāi)關(guān)信號的功能或安全隔離,以及可驅動(dòng)IGBT柵極電壓通過(guò)開(kāi)啟和關(guān)斷閾值的輸出驅動(dòng)器(以便在最短時(shí)間間隔內開(kāi)關(guān)IGBT,從而最大程度減少設備的導通損耗、開(kāi)關(guān)損耗和EMI)。在三相逆變器中,IGBT以相反方向進(jìn)行控制,以便高端和低端IGBT始終無(wú)法同時(shí)導通,哪怕時(shí)間很短。這就要求在高端和低端開(kāi)關(guān)信號之間插入一個(gè)小的死區時(shí)間片段。最大程度縮短這個(gè)死區時(shí)間段無(wú)論對系統性能還是對IGBT保護而言都非常重要(O’Sullivan)。
IGBT導通要求IGBT驅動(dòng)至飽和區域,在該區域中導通損耗最低。這通常意味著(zhù)導通電壓要大于12 V。IGBT關(guān)斷要求IGBT驅動(dòng)至工作截止區域,以便在高端IGBT導通時(shí)成功阻隔兩端的反向高電壓。原則上講,可以通過(guò)使IGBT柵極發(fā)射極電壓下降至0 V實(shí)現該目標。但是,必須考慮高端晶體管導通時(shí)的副作用。開(kāi)關(guān)節點(diǎn)電壓的快速變化導致瞬態(tài)感應電流流過(guò)低端IGBT寄生密勒電容(圖3中的CGD)。該電流流過(guò)低端柵極驅動(dòng)器(圖3中的ZDRIVER)關(guān)斷阻抗,在低端IGBT柵極發(fā)射極端創(chuàng )造出一個(gè)瞬變電壓反彈,如圖所示。如果該電壓上升至IGBT閾值電壓VTH以上,則會(huì )導致低端IGBT的短暫導通,從而形成瞬態(tài)沖擊電流,流過(guò)逆變器臂,增加功耗,影響可靠性。
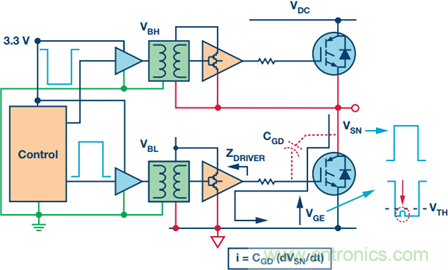
圖3. IGBT開(kāi)關(guān)的米勒效應
一般而言,有兩種方法可以解決逆變器IGBT的感應導通問(wèn)題——使用雙極性電源和/或額外的米勒箝位。在柵極驅動(dòng)器隔離端接收雙極性電源的能力為感應電壓瞬變提供了額外的裕量。例如,−7.5 V負電源軌表示需要大于8.5 V的感應電壓瞬變才能感應雜散導通。這足以防止雜散導通。另一種方法是在完成關(guān)斷轉換后的一段時(shí)間內降低柵極驅動(dòng)器電路的關(guān)斷阻抗。這稱(chēng)為米勒箝位電路。容性電流現在流經(jīng)較低阻抗的電路,隨后降低電壓瞬變的幅度。針對導通與關(guān)斷采用非對稱(chēng)柵極電阻,便可為開(kāi)關(guān)速率控制提供額外的靈活性。所有這些柵極驅動(dòng)器功能都對整個(gè)系統的可靠性與效率有正面影響。
電機驅動(dòng)中的過(guò)流保護通常在多個(gè)等級內部署。驅動(dòng)保護方案中可能包含持續過(guò)流和瞬時(shí)過(guò)流的區別,而這些過(guò)流事件具有不同的跳變電平和時(shí)間常數。這類(lèi)過(guò)流保護通?;陔娏鳒y量進(jìn)行部署。對于極快速和可能會(huì )有災難性后果的過(guò)流事件中(比如逆變器輸出短路),在柵極驅動(dòng)器中集成快速響應保護機制可能會(huì )非常有用。IGBT導通時(shí),通過(guò)監控IGBT集電極發(fā)射極電壓便可實(shí)現去飽和保護。IGBT飽和時(shí),通態(tài)電壓是IGBT內電流電平的函數,并且該保護功能可以設計成觸發(fā)一次故障,然后在通態(tài)電壓升高至超出可接受電平時(shí)快速關(guān)斷IGBT。有一段短暫的消隱時(shí)間,期間保護電路不監控IGBT的通態(tài)電壓。這是為了防止導通時(shí)由于集電極發(fā)射極電壓瞬變和/或導通事件中的瞬變過(guò)流而引起誤觸發(fā)。
ADI隔離式柵極驅動(dòng)器ADUM4135集成雙極性電源能力、米勒箝位、非對稱(chēng)導通和關(guān)斷輸出。此外,傳播延遲和更重要的傳播延遲偏斜典型值分別為業(yè)界領(lǐng)先的50 ns和15 ns。降低死區時(shí)間對系統的影響如圖4所示;圖中,低電機速度的逆變器輸出線(xiàn)對線(xiàn)電壓以?xún)蓚€(gè)不同的死區時(shí)間水平表示。與光耦合器技術(shù)有關(guān)的更高死區時(shí)間要求導致更高的電機電壓和電流失真。這樣便會(huì )增加扭矩紋波和振動(dòng)從而導致性能下降,并且由于諧波損耗增加而降低效率。這些失真效應在逆變器應用中尤為明顯,控制環(huán)路性能相對較低;然而,哪怕在高性能驅動(dòng)以及高帶寬電流和速度控制中,死區時(shí)間相關(guān)的失真也會(huì )成為極低速性能的限制因素。

圖4. (a) 500 ns死區時(shí)間以及(b) 1μs死區時(shí)間測得的線(xiàn)對線(xiàn)電機電壓
隔離電流檢測
對于分流式測量而言,電機相位電流檢測節點(diǎn)與柵極驅動(dòng)器輸出連接相同的電路,如圖2所示。因此,它們具有相同的隔離電壓和開(kāi)關(guān)瞬變。相位電流檢測對于高性能閉環(huán)電機控制而言極為重要,并且不容易在惡劣、充滿(mǎn)電氣噪聲的環(huán)境中實(shí)現高保真測量。在較高功率系統中,使用自身提供隔離功能的隔離電流傳感器(比如電流互感器或霍爾效應傳感器);而在較低功率系統中,趨勢是使用帶有隔離式Σ-Δ型調制器(比如ADIAD7403)的分流電阻。以前的系統通常使用去飽和柵極驅動(dòng)器功能來(lái)實(shí)現短路過(guò)流保護(如上文所述),而之后基于隔離式調制器的電流檢測方案可能通過(guò)快速粗調數字濾波器直接實(shí)現此功能(O’Byrne)。這便要求隔離式調制器響應和柵極驅動(dòng)器的低傳播延遲同時(shí)具備精確時(shí)序;ADI的iCoupler®技術(shù)可以做到這一點(diǎn),而傳統基于光耦合器的解決方案容易受到較長(cháng)的傳播延遲影響。
法規環(huán)境
開(kāi)發(fā)出符合所需性能的驅動(dòng)架構之后,系統必須設計并符合業(yè)界電氣安全標準。要選擇合適的隔離元件,必須了解柵極驅動(dòng)器和電流檢測節點(diǎn)的隔離要求。每個(gè)節點(diǎn)都可以采用安全隔離(加強)、基本絕緣或功能絕緣。任意單個(gè)節點(diǎn)的要求可以是安全絕緣以防止電擊,也可以采用隔離以保護低壓電路,或者采用隔離來(lái)實(shí)現數據完整性和降噪,如圖1所示。系統級要求可以通過(guò)使用多個(gè)隔離柵實(shí)現。IEC61800-5-1是已實(shí)施很長(cháng)一段時(shí)間的系統級電機驅動(dòng)標準,驅動(dòng)設計必須滿(mǎn)足該系統絕緣標準。
無(wú)論何種標準,都不涉及元件評估。IEC61800-5-1建議使用支持系統標準要求的元件級標準。IEC60747-5-5針對基于光耦合器的元件,而VDE-0884-10是IEC60747-5-5的非光隔離器版本,針對數字隔離器,于2006年開(kāi)始實(shí)施。之后開(kāi)發(fā)了VDE-0884-11并于2014年認證通過(guò),包含額外的壽命特性要求。該標準作為IEC60747-17提交給IEC認證,通常需要三年。在此期間,VDE-0884-11可用作IEC的等效標準,如圖5所示。
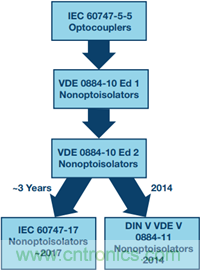
圖5. 非光隔離器標準的演進(jìn)
結論
新的電機能效國際法規加速了從固定速度、直接在線(xiàn)感應電機到逆變器控制式機器的轉變。通常要求至少采用IGBT柵極驅動(dòng)和某種形式的電流檢測來(lái)保護從簡(jiǎn)單的開(kāi)環(huán)逆變器到驅動(dòng)和伺服中的高保真電流控制。這些電路的技術(shù)要求正不斷將重點(diǎn)放在精確時(shí)序和精確測量上,以及可靠性和魯棒性上。在法規框架內實(shí)現系統設計部署對于信號隔離提出了重大挑戰。
參考電路
ABB. “ABB’s new SynRM² Motor Technology will Deliver IE5 Efficiency Without Rare Earth Magnets (ABB的SynRM²電機技術(shù)無(wú)需稀土永磁體將能提供IE5效率)。” ABB 新聞稿。2014年4月3日。
de Almeida, A.T. F. J. T. E. Ferreira和 G. Baoming“. Beyond Induction Motors—Technology Trends to Move Up Efficiency (超越感應電機——提升效率的技術(shù)發(fā)展趨勢)。”IEEE工業(yè)應用匯刊,第50卷,第3期,2014年5/6月。
O’Byrne, N。“適用于工業(yè)運動(dòng)控制的測量技術(shù)”。ADI公司,2014年。
O’Sullivan, D和M. Moroney。“利用數字隔離器技術(shù)增強工業(yè)電機控制性能”。ADI公司,2014年。
本文轉載自亞德諾半導體。
推薦閱讀:



