
【導讀】AGV是(Automated Guided Vehicle)的縮寫(xiě),意即“自動(dòng)導引運輸車(chē)”,是指裝備有電磁或光學(xué)等自動(dòng)導引裝置,它能夠沿規定的導引路徑行駛,具有安全保護以及各種移載功能的運輸車(chē)。
AGV智能運輸機器人在生產(chǎn)過(guò)程中是搬運貨物存儲非常重要的一個(gè)成員。特別是在科技時(shí)代的發(fā)展下。就現在工業(yè)發(fā)展迅速,工業(yè)生產(chǎn)線(xiàn)結合現代科技而言,運用機器人升級生產(chǎn),工業(yè)進(jìn)程表現得越來(lái)智能化,同時(shí)也使得生產(chǎn)線(xiàn)更有效率,更加安全。AGV運輸機器人自主地保護自己行駛,安全地到達指定位置等特性,使得它在自動(dòng)化行業(yè)中一枝獨秀?,F在我們來(lái)談?wù)勚鰽GV運輸機器人的幾種主流的自主安全防護方法。
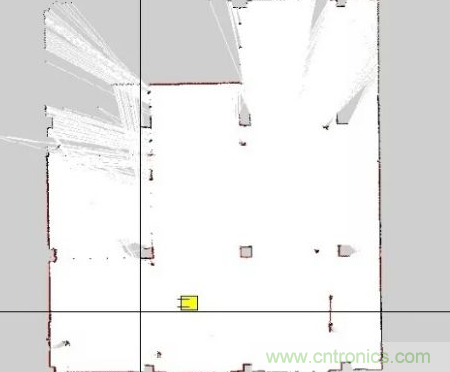
第一種,360度激光防撞。激光防撞是不需要鋪設磁條改造環(huán)境,兼容無(wú)放射板導航和反射板導航。靈活性高,路線(xiàn)變更簡(jiǎn)單,適應智能工廠(chǎng)環(huán)境的變化。它的原理是通過(guò)激光傳感器掃描周?chē)h(huán)境,在系統中創(chuàng )建環(huán)境地圖,并且在A(yíng)GV行駛過(guò)程中激光傳感器不停的獲取環(huán)境的信息,與地圖數據進(jìn)行匹配定位,并配合運動(dòng)控制器,控制算法來(lái)實(shí)現AGV的自主防護導航。
兼容反射板導航。在A(yíng)GV行駛路線(xiàn)周?chē)欢ň嚯x間隔位置布置反射板,AGV上的激光掃描發(fā)射激光束,同時(shí)采集由反射板反射回來(lái)的激光束。根據反射回來(lái)的多個(gè)激光束數據,可以確定AGV在環(huán)境中當前的位置和航向,并配合運動(dòng)控制器,控制算法來(lái)實(shí)現AGV的自主防護導航。


第二種,光電傳感器防撞,激光無(wú)軌導航叉車(chē)叉臂采用光電傳感器,當運輸機器人靠近貨物或者貨架時(shí),能夠靜距離精準感應與貨物的距離,防止運輸叉車(chē)碰撞貨物,同時(shí)也使AGV適應多種作業(yè)環(huán)境,更安全。

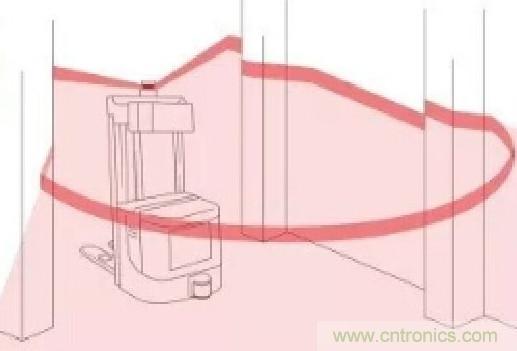
第三種,超聲波防撞。它的原理是利用超聲波遇到障礙物能反射的特性,運用超聲波傳感器能檢測與障礙物的距離,防止與障礙物碰撞。因為超聲波發(fā)射出來(lái)波束是一定的范圍空間發(fā)射出去的,所以超聲波防撞彌補了激光防撞只有水平面防撞的弊端,使得激光無(wú)軌導航叉車(chē)防撞更全面安全。

第四種是機械防撞,在A(yíng)GV運輸機器人的周?chē)惭b機械開(kāi)光,當AGV運輸機器人碰撞到物體時(shí),會(huì )被控制器采集到數據,及時(shí)調整車(chē)額運動(dòng)控制系統,讓AGV停止,使得防撞。
可見(jiàn)AGV運輸機器人的多重保護系統,使得運輸車(chē)在行駛過(guò)程中更加安全,生產(chǎn)效率也得到了大大的提高。未來(lái)AGV智能運輸機器人,將會(huì )成為工業(yè)智能化的一個(gè)主流,一個(gè)標志。
綜上所訴結合自動(dòng)化生產(chǎn)向大家推薦兩款經(jīng)濟實(shí)惠的傳感器他們分別是:超聲波避障傳感器MB1043和機器人超聲波傳感器MB7360。

超聲波避障傳感器MB1043是一款高分辨率(1mm)、高精度低功耗的超聲波傳感器,它在設計上,不僅對干擾噪音做了處理,具備抗噪音干擾能力。而且對于大小不同的目標,和變化的供電電壓,做了靈敏度的補償。另外還具備標準的的內部溫度補償,使得測量出來(lái)的距離數據更加精準。應用于室內環(huán)境,它是一款很不錯的低成本解決方案!

機器人超聲波傳感器MB7360是一款高分辨率(1mm)、高精度低功耗的超聲波傳感器,它在設計上,不僅對干擾噪音做了處理,具備抗噪音干擾能力。而且對于大小不同的目標,和變化的供電電壓,做了靈敏度的補償。另外還具備標準的的內部溫度補償,可選的外部溫度補償,使得測量出來(lái)的距離數據更加精準。直接輸出精確的距離讀數,節省了MCU的資源,更合適應用于機器人領(lǐng)域。
推薦閱讀:



