
【導讀】對于高度自動(dòng)化的汽車(chē)來(lái)說(shuō),它們必須依靠很多傳感器,包括攝像頭、雷達、超聲波、GPS天線(xiàn)和利用光脈沖測距的激光雷達。讓無(wú)人駕駛汽車(chē)看到路面、閱讀交通標志、檢測物體、分類(lèi)、感知速度/軌跡和其他車(chē)輛并不容易——更重要的是,將它定位在地圖上,以便其確切知道必須去哪里。但每種傳感器都有其自身的弱點(diǎn)和優(yōu)勢……

安裝在汽車(chē)上的一系列傳感器技術(shù)(來(lái)源:Yole Développement)
我們首先應弄清楚,如何最好地填補傳感器固有的缺陷。第二步可能更為重要,即制定最好的策略,將不同的數據流結合起來(lái),而不會(huì )丟失關(guān)鍵信息。每種傳感器以其自身的幀速率傳送數據就相當有問(wèn)題。傳感器融合則變得更加復雜——因為一些傳感器提供原始數據,而其他傳感器則提供它們自己的對象數據答案。
2017年,我們看到了感知技術(shù)方面的一系列進(jìn)步。“感知是自動(dòng)駕駛汽車(chē)軟件棧的一個(gè)主要領(lǐng)域,而且這里還有很多創(chuàng )新。”VSI Labs創(chuàng )始人兼負責人Phil Magney表示。
科技公司、一級供應商和OEM廠(chǎng)商一直在忙于搶奪它們沒(méi)有或無(wú)法自主開(kāi)發(fā)的傳感器技術(shù)。與此同時(shí),僅在過(guò)去兩年就出現了許多感知傳感器創(chuàng )業(yè)公司,它們中有許多都在關(guān)注尚處于萌芽階段的自動(dòng)駕駛汽車(chē)市場(chǎng)。
英特爾收購Mobileye
2017年最大的汽車(chē)行業(yè)交易是英特爾以153億美元收購Mobileye。
考慮到Mobileye已經(jīng)在A(yíng)DAS和自動(dòng)駕駛汽車(chē)的汽車(chē)視覺(jué)中占據了明顯的領(lǐng)先地位,Mobileye的收購使英特爾在自動(dòng)駕駛汽車(chē)的競爭中穩穩地站在了有利地位。
特別是,考慮到視覺(jué)是自動(dòng)駕駛汽車(chē)中唯一不可或缺的傳感器技術(shù),這個(gè)交易非常重要。英特爾表示,其正在將Mobileye的“計算機視覺(jué)、傳感、融合、地圖構建和驅動(dòng)策略”與英特爾的“開(kāi)放式計算平臺”相結合。
Magney將攝像頭描述為“必備的傳感器”,他解釋說(shuō),能夠以高分辨率捕捉圖像,將能使攝像頭更好地分類(lèi)物體。攝像頭也增加了顏色。那它們的弱點(diǎn)是什么?“攝像頭的深度不如激光雷達。”Magney補充說(shuō)。
激光雷達:“最熱門(mén)的領(lǐng)域”
在所有傳感器技術(shù)中,激光雷達是2017年交易量最大的市場(chǎng)。“例如,去年福特收購了普林斯頓光波;通用汽車(chē)收購了激光雷達公司Strobe;大陸公司收購了Advanced Scientific Concepts(ASC)的激光雷達業(yè)務(wù)。”IHS Markit的汽車(chē)電子和半導體高級分析師Akhilesh Kona解釋說(shuō)。
VSI Labs的Magney稱(chēng)激光雷達“仍然是最熱門(mén)的領(lǐng)域”。部分原因是激光雷達在自動(dòng)駕駛中有相當多的用途。“高度自動(dòng)化的汽車(chē)需要一個(gè)具有定位資產(chǎn)的基本地圖,對此沒(méi)有任何東西能夠取代激光雷達。”他表示,“這是高端產(chǎn)品競爭的地方。”
新的激光技術(shù)的出現也可以追溯到熱門(mén)的激光雷達市場(chǎng)。據IHS Markit的Kona表示,業(yè)界正在出現一種新的激光發(fā)射器技術(shù)——波長(cháng)高于1,400nm。這種新的波長(cháng)在激光雷達上會(huì )有更高的分辨率和更長(cháng)的射程。普林斯頓光波、大陸(通過(guò)收購ASC)和Luminar Technologies三家公司都在研究新的激光器,他補充說(shuō)。
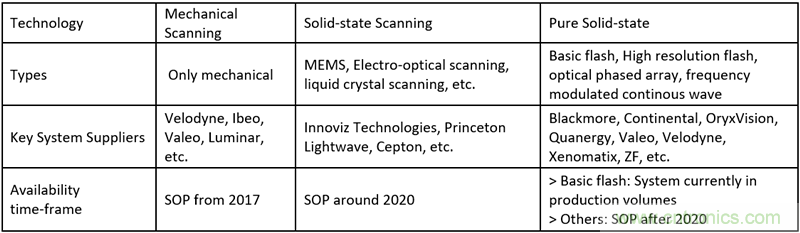
不同類(lèi)型激光雷達的比較(來(lái)源:IHS Markit)
與此同時(shí),供應商通過(guò)開(kāi)發(fā)各種光束控制技術(shù),不斷提高激光雷達的耐用性、尺寸和成本。這些技術(shù)既有機械也有MEMS和固態(tài)。
據Magney所述,機械激光雷達(例如Velodyne 128通道產(chǎn)品)由于可以產(chǎn)生360度的點(diǎn)云,非常適合地圖構建。
但是對于量產(chǎn)汽車(chē)的部署,基于固態(tài)器件(MEMS或OPA(光學(xué)相控陣))的激光雷達非常好使,Magney說(shuō)。它們也可以在自己的視野內產(chǎn)生一個(gè)點(diǎn)云。
成本更低Flash器件也在出現。它們中有一些被設計成接近探測器,成本低于100美元,Magney表示。缺點(diǎn)是分辨率有限,無(wú)法對物體進(jìn)行分類(lèi),他解釋說(shuō)。
毫米波雷達
當激光雷達大步向前進(jìn)時(shí),雷達也沒(méi)有停下腳步。繼恩智浦半導體在2016年首次推出CMOS工藝的77GHz微型雷達芯片后,德州儀器去年也進(jìn)入毫米波雷達市場(chǎng)。該公司現在宣稱(chēng)具有最小尺寸的CMOS傳感器產(chǎn)品組合。
在雷達市場(chǎng),競爭的重點(diǎn)在于尺寸和精度。TI現在宣稱(chēng)是“分辨率小于4cm的高精度獨立傳感”。

TI的汽車(chē)毫米波雷達傳感器將射頻(RF)和模擬功能與數字控制功能集成到了一個(gè)芯片中。(來(lái)源:TI)
Magney表示:“我們對雷達的進(jìn)展感到愜意。毫米波雷達很熱。”他評論道:“雷達的分辨率越來(lái)越高,現在也可以分類(lèi)物體,這是以前做不到的。”
然而,更好的分辨率需要更多的通道,這意味著(zhù)更多的數據需要處理。“所以毫米波雷達需要有專(zhuān)門(mén)的處理器來(lái)處理這些數據,產(chǎn)生物體或者點(diǎn)云,”Magney指出。此外,毫米波雷達需要有開(kāi)發(fā)工具來(lái)搭建應用。否則,這些數據很難被理解。
雷達除了能全天候工作外,往往會(huì )受到負面評價(jià)。傳統的汽車(chē)雷達看不到攝像頭或激光雷達所能看到的物體。更具體地說(shuō),雷達看不到遙遠的物體,不能辨別它們看到的東西。它們的處理速度不足以達到高速公路的要求。
模擬波束成形
2017年1月成立的創(chuàng )業(yè)公司Metawave,希望通過(guò)開(kāi)發(fā)模擬波束成形技術(shù)來(lái)改變這種狀況。
利用PARC將超材料、雷達和天線(xiàn)商業(yè)化的獨家授權,Metawave在本月的CES消費電子展上推出了該公司“全套雷達套件”的原型。該公司的超材料是布置在PCB板上的小型軟件控制工程結構。據稱(chēng),這些結構能夠以特殊的方式控制電磁波束,這在以前通常只有在體積大得多、更強大和成本更高的軍用系統中才能實(shí)現。

Metawave的模擬雷達技術(shù)是基于電子可控天線(xiàn)。它使用一根帶有兩個(gè)端口的天線(xiàn):一個(gè)端口連接到Tx或Rx鏈路,另一個(gè)連接到MCU。MCU通過(guò)查找表來(lái)定義和控制天線(xiàn)波束寬度和方向,從而使Metawave的模擬雷達能夠實(shí)現微秒級速度的掃描。(來(lái)源:Metawave)
Metawave的全套雷達套件是雷達芯片不可知的。該公司宣稱(chēng)其基于超材料的模擬波束成形技術(shù)可以精確控制雷達波束,在不犧牲分辨率的情況下實(shí)現更快的工作速度和更好的信噪比。
面向機器使用的成像數據
盡管Mobileye仍然是汽車(chē)視覺(jué)領(lǐng)域的領(lǐng)導者,Magney認為其他公司正在迎頭趕上。“任何人都可以獲得相同的成像器,構建適合于圖像識別的攝像頭。但問(wèn)題是你需要合適的處理器和緊密集成的算法。”他補充道。
“但是對此,現在你也可以從幾家芯片公司中的任何一家選擇一款高性能視覺(jué)處理器,并應用自己的算法?;蛘?,你也可以用CNN(卷積神經(jīng)網(wǎng)絡(luò ))來(lái)完成這項工作。”Magney總結道,“目前,自動(dòng)駕駛汽車(chē)的制造商在攝像頭方面有了選擇。許多公司會(huì )將AI應用于圖像來(lái)獲得結果。”
然后是Chronocam。這家總部位于巴黎的創(chuàng )業(yè)公司的傳感器技術(shù)不是面向人類(lèi)使用,而是面向機器傳感和檢測設計;該公司認為,這項技術(shù)可以徹底改變當今CMOS圖像傳感器市場(chǎng)。Chronocam的事件驅動(dòng)傳感器還很新,尚未在任何商用車(chē)上使用,但這項技術(shù)正受到關(guān)注。例如,雷諾集團于2016年底與Chronocam達成了戰略發(fā)展協(xié)議。
正如Chronocam的CEO在接受本刊采訪(fǎng)時(shí)表示,英特爾、Nvidia等GPU/CPU領(lǐng)域的大公司仍在試圖找出更準確、更快速處理大量數據的最佳方式。然而,Chronocam專(zhuān)注的是針對機器應用簡(jiǎn)化和定制的成像數據采集。事件驅動(dòng)傳感器的目標是顯著(zhù)減少數據負載,使汽車(chē)幾乎可以做出實(shí)時(shí)決策。
定位
使汽車(chē)具有“自我意識”的第一步是地圖構建,而與汽車(chē)在預先制作的地圖上看到的內容進(jìn)行實(shí)時(shí)匹配。然后,汽車(chē)可以對其位置進(jìn)行三角測量和定位。“汽車(chē)必須確切知道它必須去哪里,”Magney說(shuō),以便它可以發(fā)展“情境感知”。
換句話(huà)說(shuō),如果希望高度自動(dòng)化的車(chē)輛能準確定位,它們需要激光雷達。它們需要一個(gè)具有定位資產(chǎn)的基本地圖,對此沒(méi)有任何東西可以替代激光雷達,Magney指出。
但是,還有其他方法可以做到這一點(diǎn)。例如,Nvidia的DriveWorks SDK可以實(shí)現基于圖像的定位。DriveWorks的庫包括地圖定位、高清地圖接口以及自我運動(dòng)。
實(shí)時(shí)動(dòng)態(tài)定位(RTK)是另一種選擇,Magney補充說(shuō)。RTK可增強來(lái)自全球導航衛星系統(如GPS、GLONASS、伽利略和北斗)的位置數據的精度。“你可能運氣不錯,但是在城市地區,由于RTK需要高度依賴(lài)衛星,我們認為它不會(huì )那么好地工作。”Magney表示。
與此同時(shí),英特爾/Mobileye正在推廣其面向定位的道路體驗管理(REM)技術(shù)。Mobileye希望通過(guò)利用基于攝像頭的ADAS系統的涌現,利用人群的力量來(lái)準實(shí)時(shí)地建立和維護一個(gè)精確的環(huán)境地圖。
初創(chuàng )企業(yè)在定位方面也有發(fā)揮的空間。據悉,初創(chuàng )公司DeepMap正在為第4/第5級自動(dòng)駕駛汽車(chē)解決高清地圖構建和定位以及大數據管理方面的挑戰。Magney指出,DeepMap正在通過(guò)使用攝像頭圖像和激光雷達數據來(lái)改進(jìn)當前的數字地圖。該公司計劃打包一個(gè)服務(wù),而不是一個(gè)產(chǎn)品,他補充說(shuō)。
傳感器融合
隨著(zhù)自動(dòng)駕駛汽車(chē)收集到所有的傳感數據,最重要的就是傳感器融合的質(zhì)量。傳感器融合的結果決定了自動(dòng)駕駛汽車(chē)的決策和行為,也即安全問(wèn)題。
自動(dòng)駕駛汽車(chē)僅采用一個(gè)傳感器不可能實(shí)現可靠駕駛,因此必須進(jìn)行傳感器融合。但Magney補充說(shuō):“因為你必須同步所有傳感器信號,所以融合是很難的。”
關(guān)于是融合“對象”數據還是“原始”數據,業(yè)界的爭論才剛剛開(kāi)始。目前沒(méi)有明確的答案。
與對象數據相比,由于原始數據在轉換中沒(méi)有任何東西丟失,AI的大多數支持者更喜歡融合這種數據,Magney表示。但他補充說(shuō),與原始數據融合有關(guān)的問(wèn)題包括:你將需要大量的處理;你還需要有GB大小的網(wǎng)絡(luò )來(lái)將這些信號傳送到整個(gè)車(chē)輛中。
DeepScale公司開(kāi)發(fā)了一種感知技術(shù),可以采集原始數據,而不是對象數據,可以在嵌入式處理器上加速傳感器融合。DeepScale正在利用自己的深度神經(jīng)網(wǎng)絡(luò )(DNN)白手起家——其不僅使用了圖像傳感器的原始數據,還使用了雷達和激光雷達的原始數據。

DeepScale開(kāi)發(fā)用于早期傳感器融合的深度神經(jīng)網(wǎng)絡(luò )(來(lái)源:DeepSacle)
DeepScale在后期融合中遇到了一個(gè)固有問(wèn)題。創(chuàng )建對象時(shí),與其他傳感數據相關(guān)的原始數據可能會(huì )丟失。
接下來(lái)按照字母順序列出一些傳感器公司——包括最近被成熟OEM廠(chǎng)商收購的初創(chuàng )公司和風(fēng)投公司——它們可能會(huì )影響到2018年的自動(dòng)駕駛汽車(chē)發(fā)展(感興趣的讀者可點(diǎn)擊公司鏈接或閱讀原文了解)。
Aeva Inc.:http://www.aeva.ai/
AEye Inc.:https://aeye.ai/
Arbe Robotics:http://www.arberobotics.com/
Autoliv, Inc.:https://www.autoliv.com/
Chirp Microsystems:http://www.chirpmicro.com/
Chronocam
DeepMap:www.deepmap.ai/
DeepScale:http://deepscale.ai/
Fisker Inc.:https://www.fiskerinc.com/
LeddarTech:https://leddartech.com/
Metawave:https://www.metawave.co/
Omron:https://www.omron.com/
Ouster:www.ouster.io/
Princeton Lightwave, Inc./Argo AI:https://www.argo.ai/
Renesas Electronics/Dibotics:http://www.dibotics.com/
Innoviz Technologies:https://innoviz.tech/
Luminar:https://www.luminartech.com/
TetraVue:www.tetravue.com/
本文轉載自電子技術(shù)設計。


