
【導讀】在網(wǎng)上看了不少與卡爾曼濾波相關(guān)的博客、論文,要么是只談理論、缺乏感性,或者有感性認識,缺乏理論推導。能兼顧二者的少之又少,直到我看到了國外的一篇博文,真的驚艷到我了,不得不佩服作者這種細致入微的精神,翻譯過(guò)來(lái)跟大家分享一下。
我不得不說(shuō)說(shuō)卡爾曼濾波,因為它能做到的事情簡(jiǎn)直讓人驚嘆!意外的是很少有軟件工程師和科學(xué)家對對它有所了解,這讓我感到沮喪,因為卡爾曼濾波是一個(gè)如此強大的工具,能夠在不確定性中融合信息,與此同時(shí),它提取精確信息的能力看起來(lái)不可思議。
什么是卡爾曼濾波?
你可以在任何含有不確定信息的動(dòng)態(tài)系統中使用卡爾曼濾波,對系統下一步的走向做出有根據的預測,即使伴隨著(zhù)各種干擾,卡爾曼濾波總是能指出真實(shí)發(fā)生的情況。
在連續變化的系統中使用卡爾曼濾波是非常理想的,它具有占用內存小的優(yōu)點(diǎn)(除了前一個(gè)狀態(tài)量外,不需要保留其它歷史數據),并且速度很快,很適合應用于實(shí)時(shí)問(wèn)題和嵌入式系統。
在Google上找到的大多數關(guān)于實(shí)現卡爾曼濾波的數學(xué)公式看起來(lái)有點(diǎn)晦澀難懂,這個(gè)狀況有點(diǎn)糟糕。實(shí)際上,如果以正確的方式看待它,卡爾曼濾波是非常簡(jiǎn)單和容易理解的,下面我將用漂亮的圖片和色彩清晰的闡述它,你只需要懂一些基本的概率和矩陣的知識就可以了。
我們能用卡爾曼濾波做什么?
用玩具舉例:你開(kāi)發(fā)了一個(gè)可以在樹(shù)林里到處跑的小機器人,這個(gè)機器人需要知道它所在的確切位置才能導航。

我們可以說(shuō)機器人有一個(gè)狀態(tài) ,表示位置和速度:
,表示位置和速度:
注意這個(gè)狀態(tài)只是關(guān)于這個(gè)系統基本屬性的一堆數字,它可以是任何其它的東西。在這個(gè)例子中是位置和速度,它也可以是一個(gè)容器中液體的總量,汽車(chē)發(fā)動(dòng)機的溫度,用戶(hù)手指在觸摸板上的位置坐標,或者任何你需要跟蹤的信號。
這個(gè)機器人帶有GPS,精度大約為10米,還算不錯,但是,它需要將自己的位置精確到10米以?xún)?。?shù)林里有很多溝壑和懸崖,如果機器人走錯了一步,就有可能掉下懸崖,所以只有GPS是不夠的。

或許我們知道一些機器人如何運動(dòng)的信息:例如,機器人知道發(fā)送給電機的指令,知道自己是否在朝一個(gè)方向移動(dòng)并且沒(méi)有人干預,在下一個(gè)狀態(tài),機器人很可能朝著(zhù)相同的方向移動(dòng)。當然,機器人對自己的運動(dòng)是一無(wú)所知的:它可能受到風(fēng)吹的影響,輪子方向偏了一點(diǎn),或者遇到不平的地面而翻倒。所以,輪子轉過(guò)的長(cháng)度并不能精確表示機器人實(shí)際行走的距離,預測也不是很完美。
GPS 傳感器告訴了我們一些狀態(tài)信息,我們的預測告訴了我們機器人會(huì )怎樣運動(dòng),但都只是間接的,并且伴隨著(zhù)一些不確定和不準確性。但是,如果使用所有對我們可用的信息,我們能得到一個(gè)比任何依據自身估計更好的結果嗎?回答當然是YES,這就是卡爾曼濾波的用處。
卡爾曼濾波是如何看到你的問(wèn)題的
下面我們繼續以只有位置和速度這兩個(gè)狀態(tài)的簡(jiǎn)單例子做解釋。
我們并不知道實(shí)際的位置和速度,它們之間有很多種可能正確的組合,但其中一些的可能性要大于其它部分:
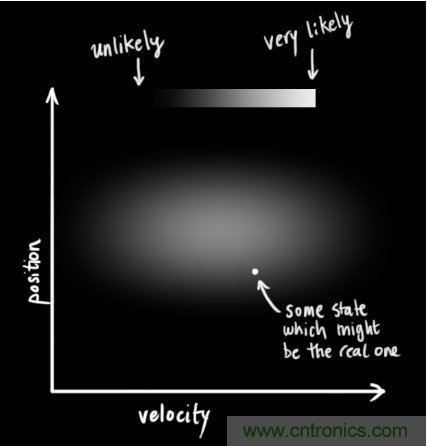
卡爾曼濾波假設兩個(gè)變量(位置和速度,在這個(gè)例子中)都是隨機的,并且服從高斯分布。每個(gè)變量都有一個(gè)均值 μ,表示隨機分布的中心(最可能的狀態(tài)),以及方差 ,表示不確定性。
,表示不確定性。
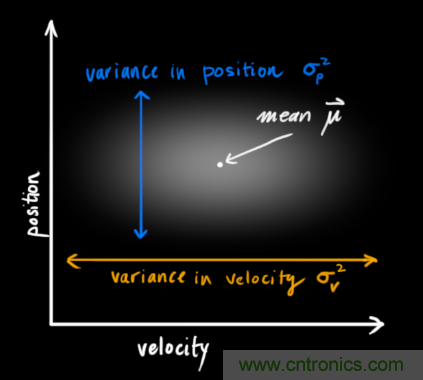
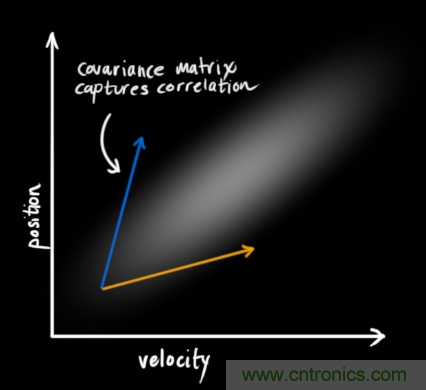
在上圖中,位置和速度是不相關(guān)的,這意味著(zhù)由其中一個(gè)變量的狀態(tài)無(wú)法推測出另一個(gè)變量可能的值。下面的例子更有趣:位置和速度是相關(guān)的,觀(guān)測特定位置的可能性取決于當前的速度:

這種情況是有可能發(fā)生的,例如,我們基于舊的位置來(lái)估計新位置。如果速度過(guò)高,我們可能已經(jīng)移動(dòng)很遠了。如果緩慢移動(dòng),則距離不會(huì )很遠。跟蹤這種關(guān)系是非常重要的,因為它帶給我們更多的信息:其中一個(gè)測量值告訴了我們其它變量可能的值,這就是卡爾曼濾波的目的,盡可能地在包含不確定性的測量數據中提取更多信息!
這種相關(guān)性用協(xié)方差矩陣來(lái)表示,簡(jiǎn)而言之,矩陣中的每個(gè)元素 表示第 i 個(gè)和第 j 個(gè)狀態(tài)變量之間的相關(guān)度。(你可能已經(jīng)猜到協(xié)方差矩陣是一個(gè)對稱(chēng)矩陣,這意味著(zhù)可以任意交換 i 和 j)。協(xié)方差矩陣通常用“
表示第 i 個(gè)和第 j 個(gè)狀態(tài)變量之間的相關(guān)度。(你可能已經(jīng)猜到協(xié)方差矩陣是一個(gè)對稱(chēng)矩陣,這意味著(zhù)可以任意交換 i 和 j)。協(xié)方差矩陣通常用“ ”來(lái)表示,其中的元素則表示為“
”來(lái)表示,其中的元素則表示為“ ”。
”。
使用矩陣來(lái)描述問(wèn)題
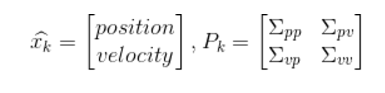
我們基于高斯分布來(lái)建立狀態(tài)變量,所以在時(shí)刻 k 需要兩個(gè)信息:最佳估計 (即均值,其它地方常用 μ 表示),以及協(xié)方差矩陣
(即均值,其它地方常用 μ 表示),以及協(xié)方差矩陣 。
。
 (1)
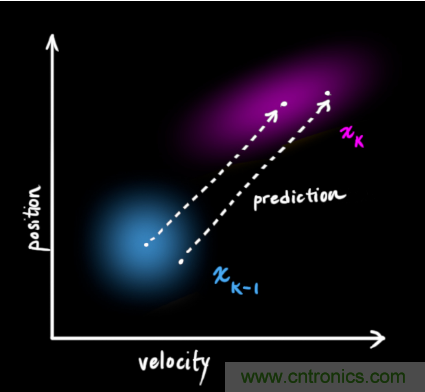
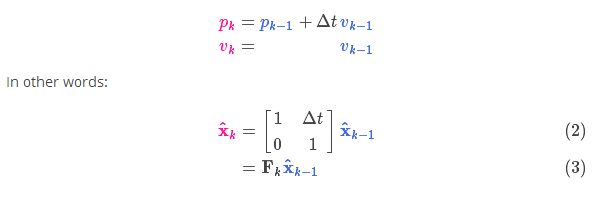
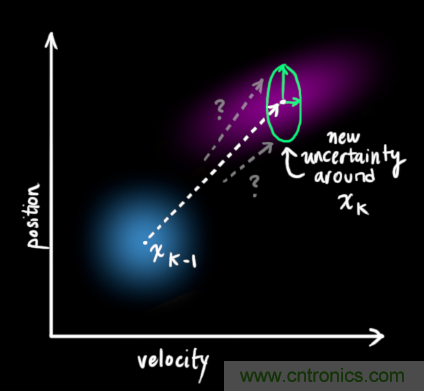
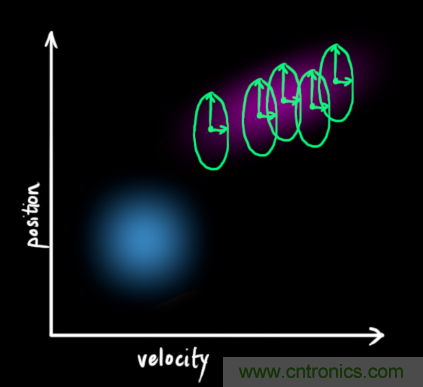
(1)(當然,在這里我們只用到了位置和速度,實(shí)際上這個(gè)狀態(tài)可以包含多個(gè)變量,代表任何你想表示的信息)。接下來(lái),我們需要根據當前狀態(tài)(k-1 時(shí)刻)來(lái)預測下一狀態(tài)(k 時(shí)刻)。記住,我們并不知道對下一狀態(tài)的所有預測中哪個(gè)是“真實(shí)”的,但我們的預測函數并不在乎。它對所有的可能性進(jìn)行預測,并給出新的高斯分布。
我們可以用矩陣 來(lái)表示這個(gè)預測過(guò)程:
來(lái)表示這個(gè)預測過(guò)程:
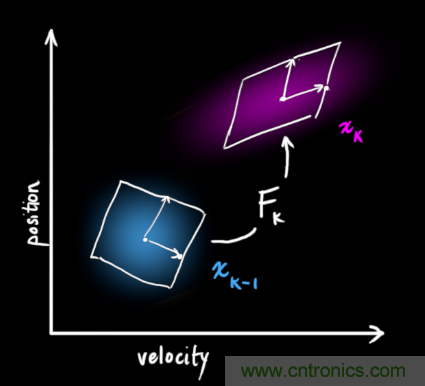
它將我們原始估計中的每個(gè)點(diǎn)都移動(dòng)到了一個(gè)新的預測位置,如果原始估計是正確的話(huà),這個(gè)新的預測位置就是系統下一步會(huì )移動(dòng)到的位置。那我們又如何用矩陣來(lái)預測下一個(gè)時(shí)刻的位置和速度呢?下面用一個(gè)基本的運動(dòng)學(xué)公式來(lái)表示:
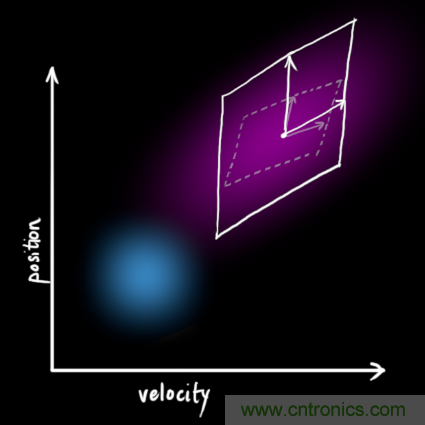
現在,我們有了一個(gè)預測矩陣來(lái)表示下一時(shí)刻的狀態(tài),但是,我們仍然不知道怎么更新協(xié)方差矩陣。此時(shí),我們需要引入另一個(gè)公式,如果我們將分布中的每個(gè)點(diǎn)都乘以矩陣 A,那么它的協(xié)方差矩陣 會(huì )怎樣變化呢?很簡(jiǎn)單,下面給出公式:
會(huì )怎樣變化呢?很簡(jiǎn)單,下面給出公式:

結合方程(4)和(3)得到:

外部控制量
我們并沒(méi)有捕捉到一切信息,可能存在外部因素會(huì )對系統進(jìn)行控制,帶來(lái)一些與系統自身狀態(tài)沒(méi)有相關(guān)性的改變。
以火車(chē)的運動(dòng)狀態(tài)模型為例,火車(chē)司機可能會(huì )操縱油門(mén),讓火車(chē)加速。相同地,在我們機器人這個(gè)例子中,導航軟件可能會(huì )發(fā)出一個(gè)指令讓輪子轉向或者停止。如果知道這些額外的信息,我們可以用一個(gè)向量 來(lái)表示,將它加到我們的預測方程中做修正。
來(lái)表示,將它加到我們的預測方程中做修正。
假設由于油門(mén)的設置或控制命令,我們知道了期望的加速度 ,根據基本的運動(dòng)學(xué)方程可以得到:
,根據基本的運動(dòng)學(xué)方程可以得到:

以矩陣的形式表示就是:

外部干擾
如果這些狀態(tài)量是基于系統自身的屬性或者已知的外部控制作用來(lái)變化的,則不會(huì )出現什么問(wèn)題。
但是,如果存在未知的干擾呢?例如,假設我們跟蹤一個(gè)四旋翼飛行器,它可能會(huì )受到風(fēng)的干擾,如果我們跟蹤一個(gè)輪式機器人,輪子可能會(huì )打滑,或者路面上的小坡會(huì )讓它減速。這樣的話(huà)我們就不能繼續對這些狀態(tài)進(jìn)行跟蹤,如果沒(méi)有把這些外部干擾考慮在內,我們的預測就會(huì )出現偏差。
在每次預測之后,我們可以添加一些新的不確定性來(lái)建立這種與“外界”(即我們沒(méi)有跟蹤的干擾)之間的不確定性模型:
原始估計中的每個(gè)狀態(tài)變量更新到新的狀態(tài)后,仍然服從高斯分布。我們可以說(shuō) 的每個(gè)狀態(tài)變量移動(dòng)到了一個(gè)新的服從高斯分布的區域,協(xié)方差為
的每個(gè)狀態(tài)變量移動(dòng)到了一個(gè)新的服從高斯分布的區域,協(xié)方差為 。換句話(huà)說(shuō)就是,我們將這些沒(méi)有被跟蹤的干擾當作協(xié)方差為
。換句話(huà)說(shuō)就是,我們將這些沒(méi)有被跟蹤的干擾當作協(xié)方差為 的噪聲來(lái)處理。
的噪聲來(lái)處理。
這產(chǎn)生了具有不同協(xié)方差(但是具有相同的均值)的新的高斯分布。
我們通過(guò)簡(jiǎn)單地添加 得到擴展的協(xié)方差,下面給出預測步驟的完整表達式:
得到擴展的協(xié)方差,下面給出預測步驟的完整表達式:

由上式可知,新的最優(yōu)估計是根據上一最優(yōu)估計預測得到的,并加上已知外部控制量的修正。
而新的不確定性由上一不確定性預測得到,并加上外部環(huán)境的干擾。
好了,我們對系統可能的動(dòng)向有了一個(gè)模糊的估計,用 和
和 來(lái)表示。如果再結合傳感器的數據會(huì )怎樣呢?
來(lái)表示。如果再結合傳感器的數據會(huì )怎樣呢?
用測量值來(lái)修正估計值
我們可能會(huì )有多個(gè)傳感器來(lái)測量系統當前的狀態(tài),哪個(gè)傳感器具體測量的是哪個(gè)狀態(tài)變量并不重要,也許一個(gè)是測量位置,一個(gè)是測量速度,每個(gè)傳感器間接地告訴了我們一些狀態(tài)信息。
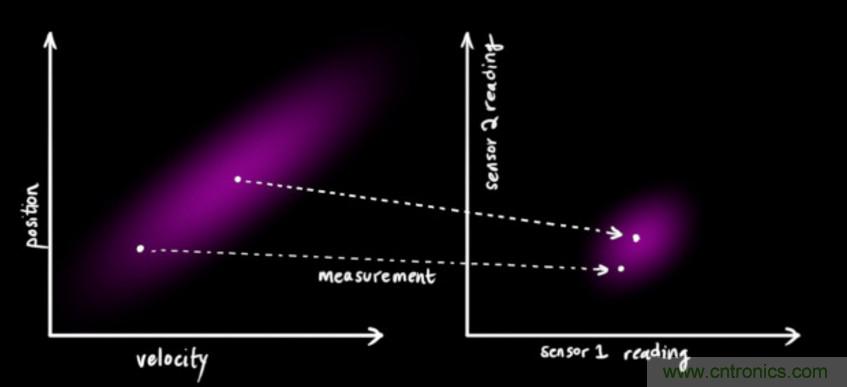
注意,傳感器讀取的數據的單位和尺度有可能與我們要跟蹤的狀態(tài)的單位和尺度不一樣,我們用矩陣 來(lái)表示傳感器的數據。
來(lái)表示傳感器的數據。
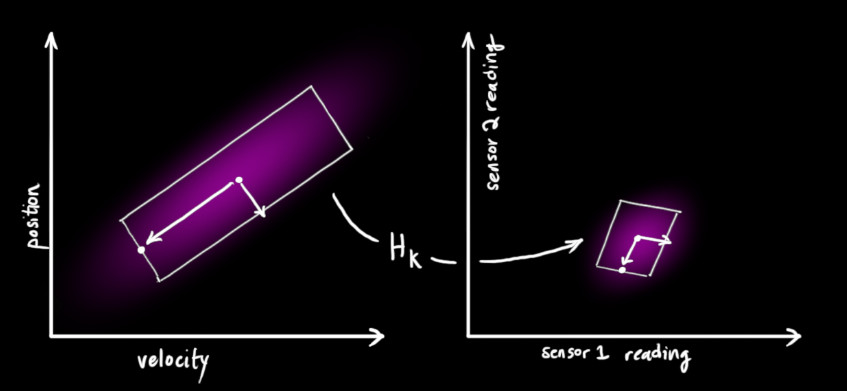
我們可以計算出傳感器讀數的分布,用之前的表示方法如下式所示:

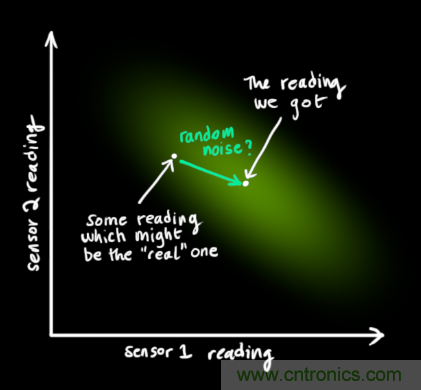
卡爾曼濾波的一大優(yōu)點(diǎn)就是能處理傳感器噪聲,換句話(huà)說(shuō),我們的傳感器或多或少都有點(diǎn)不可靠,并且原始估計中的每個(gè)狀態(tài)可以和一定范圍內的傳感器讀數對應起來(lái)。
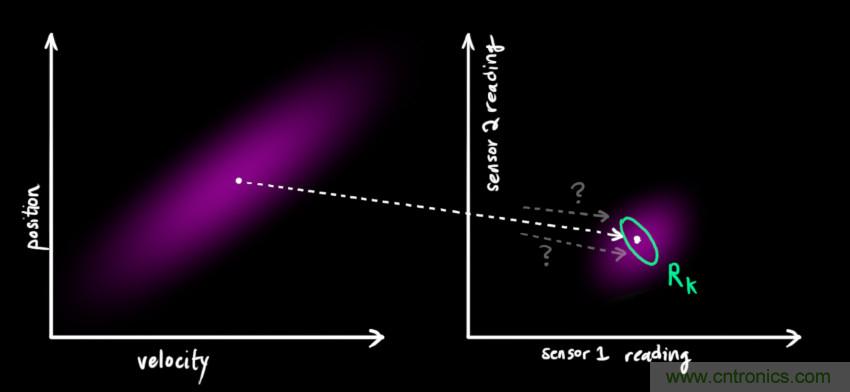
從測量到的傳感器數據中,我們大致能猜到系統當前處于什么狀態(tài)。但是由于存在不確定性,某些狀態(tài)可能比我們得到的讀數更接近真實(shí)狀態(tài)。
我們將這種不確定性(例如:傳感器噪聲)用協(xié)方差 表示,該分布的均值就是我們讀取到的傳感器數據,稱(chēng)之為
表示,該分布的均值就是我們讀取到的傳感器數據,稱(chēng)之為 。
。
現在我們有了兩個(gè)高斯分布,一個(gè)是在預測值附近,一個(gè)是在傳感器讀數附近。
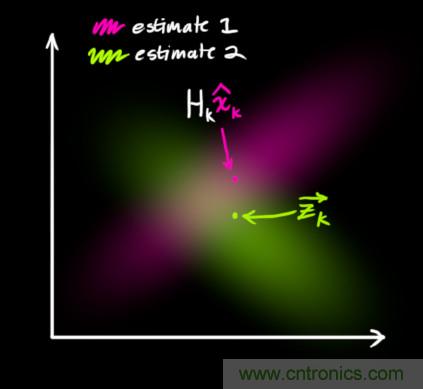
我們必須在預測值(粉紅色)和傳感器測量值(綠色)之間找到最優(yōu)解。
那么,我們最有可能的狀態(tài)是什么呢?對于任何可能的讀數 ,有兩種情況:(1)傳感器的測量值;(2)由前一狀態(tài)得到的預測值。如果我們想知道這兩種情況都可能發(fā)生的概率,將這兩個(gè)高斯分布相乘就可以了。
,有兩種情況:(1)傳感器的測量值;(2)由前一狀態(tài)得到的預測值。如果我們想知道這兩種情況都可能發(fā)生的概率,將這兩個(gè)高斯分布相乘就可以了。
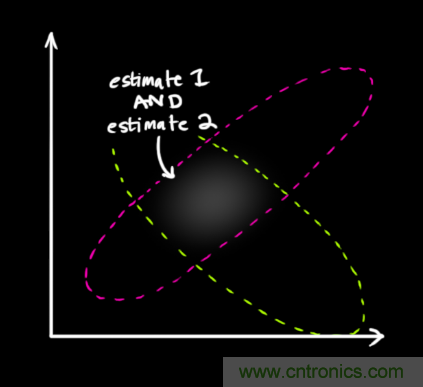
剩下的就是重疊部分了,這個(gè)重疊部分的均值就是兩個(gè)估計最可能的值,也就是給定的所有信息中的最優(yōu)估計。
瞧!這個(gè)重疊的區域看起來(lái)像另一個(gè)高斯分布。
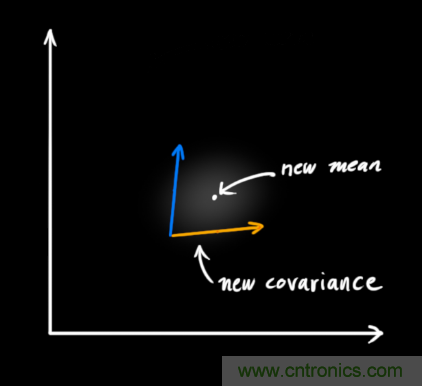
如你所見(jiàn),把兩個(gè)具有不同均值和方差的高斯分布相乘,你會(huì )得到一個(gè)新的具有獨立均值和方差的高斯分布!下面用公式講解。
融合高斯分布
先以一維高斯分布來(lái)分析比較簡(jiǎn)單點(diǎn),具有方差 和 μ 的高斯曲線(xiàn)可以用下式表示:
和 μ 的高斯曲線(xiàn)可以用下式表示:

如果把兩個(gè)服從高斯分布的函數相乘會(huì )得到什么呢?
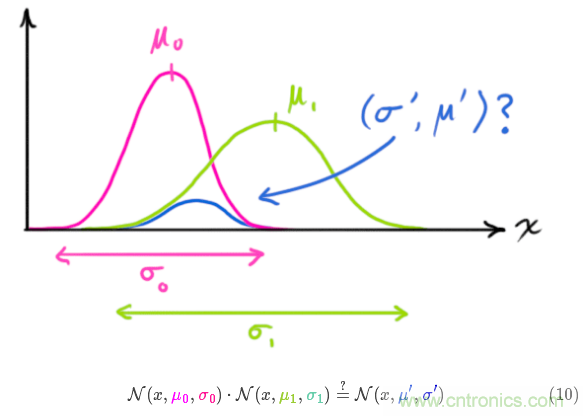
將式(9)代入到式(10)中(注意重新歸一化,使總概率為1)可以得到:
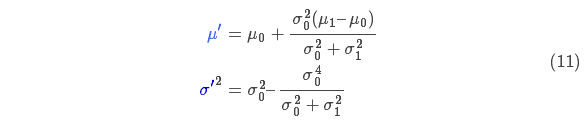
將式(11)中的兩個(gè)式子相同的部分用 k 表示:
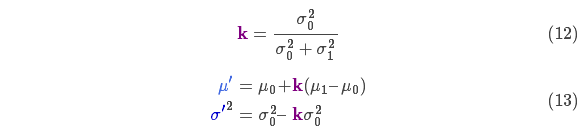
下面進(jìn)一步將式(12)和(13)寫(xiě)成矩陣的形式,如果 Σ 表示高斯分布的協(xié)方差, 表示每個(gè)維度的均值,則:
表示每個(gè)維度的均值,則:
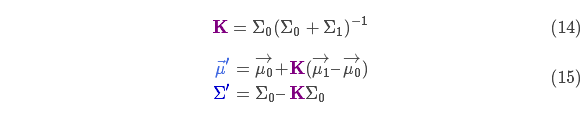
矩陣 稱(chēng)為卡爾曼增益,下面將會(huì )用到。放松!我們快要完成了!
稱(chēng)為卡爾曼增益,下面將會(huì )用到。放松!我們快要完成了!
將所有公式整合起來(lái)
我們有兩個(gè)高斯分布,預測部分 ,和測量部分
,和測量部分 ,將它們放到式(15)中算出它們之間的重疊部分:
,將它們放到式(15)中算出它們之間的重疊部分:

由式(14)可得卡爾曼增益為:
將式(16)和式(17)的兩邊同時(shí)左乘矩陣的逆(注意 里面包含了
里面包含了 )將其約掉,再將式(16)的第二個(gè)等式兩邊同時(shí)右乘矩陣
)將其約掉,再將式(16)的第二個(gè)等式兩邊同時(shí)右乘矩陣 的逆得到以下等式:
的逆得到以下等式:

上式給出了完整的更新步驟方程。 就是新的最優(yōu)估計,我們可以將它和
就是新的最優(yōu)估計,我們可以將它和 放到下一個(gè)預測和更新方程中不斷迭代。
放到下一個(gè)預測和更新方程中不斷迭代。
總結
以上所有公式中,你只需要用到式(7)、(18)、(19)。(如果忘了的話(huà),你可以根據式(4)和(15)重新推導一下)
我們可以用這些公式對任何線(xiàn)性系統建立精確的模型,對于非線(xiàn)性系統來(lái)說(shuō),我們使用擴展卡爾曼濾波,區別在于EKF多了一個(gè)把預測和測量部分進(jìn)行線(xiàn)性化的過(guò)程。
本文轉載自電子工程專(zhuān)輯。
推薦閱讀:



