

【導讀】成功的自動(dòng)駕駛汽車(chē)必定將使用緊密集成的傳感器系統來(lái)達到甚至超越人類(lèi)的駕駛能力。人類(lèi)駕駛員一般利用雙眼、雙耳,以及車(chē)輛運動(dòng)給人的反饋來(lái)駕駛汽車(chē)。我們的大腦會(huì )實(shí)時(shí)處理所有這些信息,并從人腦的駕駛經(jīng)驗數據庫中直覺(jué)反應。復現人類(lèi)駕駛能力所需的傳感器包括雷達、激光雷達(LIDAR)、攝像頭、慣性測量單元(IMU),以及超聲波傳感器。每種系統都有其優(yōu)勢,也有其缺點(diǎn)。單一傳感器的精度和性性能不足以取代所有其他傳感器相輔相成的多傳感器融合是大趨勢。本文將介紹與LIDAR有關(guān)的主要設計考量,LIDAR是一種傳感器,為各種自動(dòng)駕駛解決方案提供大量數據。
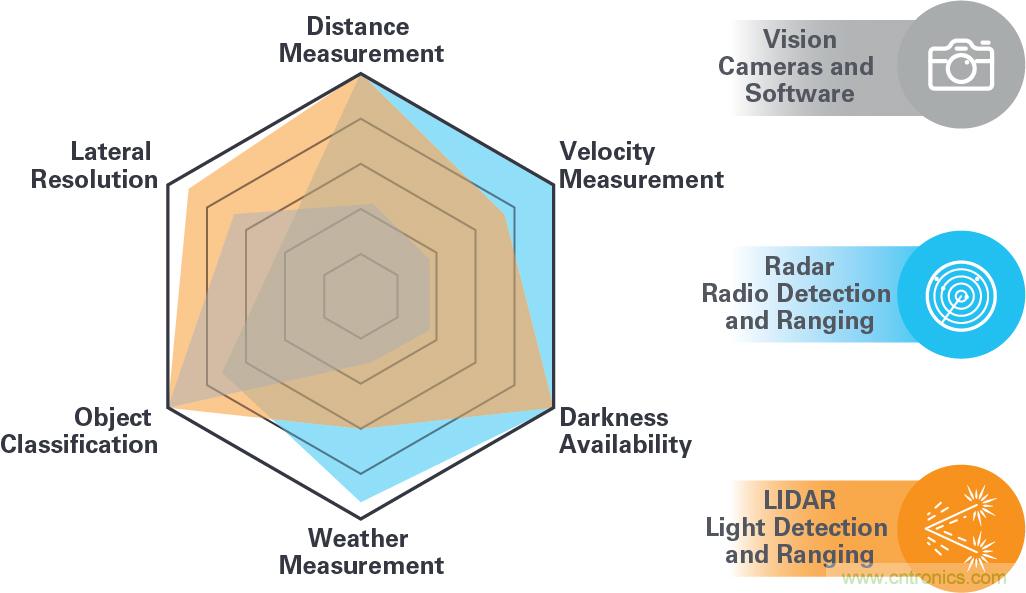
圖1.蛛網(wǎng)圖,比較視覺(jué)、雷達和LIDAR。
在自動(dòng)駕駛汽車(chē)中,LIDAR與雷達密切合作。這兩種技術(shù)在工作中不會(huì )產(chǎn)生可見(jiàn)光,這對于夜間駕駛或弱光條件至關(guān)重要。雷達適合遠距離檢測和跟蹤,LIDAR則提供更高的角分辨率,可以識別對象并對其進(jìn)行分類(lèi)。換句話(huà)說(shuō),雷達適合檢測對象是否存在,LIDAR則能夠在雷達檢測到對象的基礎上提供關(guān)于該對象的具體信息。
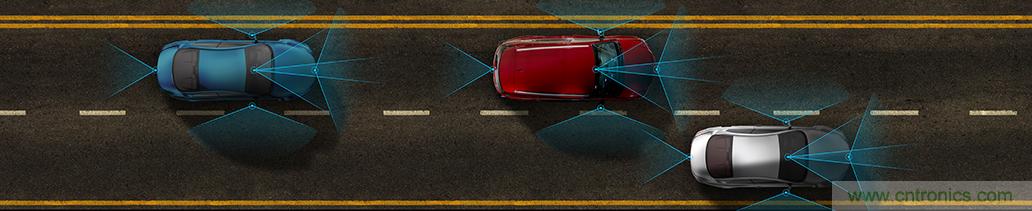
圖2.自動(dòng)駕駛汽車(chē)的LIDAR感知。
設計LIDAR系統時(shí)會(huì )面臨一些技術(shù)挑戰,主要挑戰之一就是近紅外波長(cháng)要保持在人眼安全限值之下。關(guān)于這些安全指南,請參考IEC 60825-1。這并不是要降低人眼安全的重要性,本文探討的所有方面最終都會(huì )影響人眼安全。目前存在多種不同的LIDAR系統技術(shù),設計復雜程度各不相同,各有其優(yōu)點(diǎn)和缺點(diǎn)。
重要的是,所有設計需要關(guān)注的基礎方面都相同。再此我們著(zhù)重討論人眼安全以外影響系統設計的其他方面,包括:SNR最大化、最小可檢測要求、視場(chǎng)、散熱、功耗,以及航位推測。
查看接收鏈路,會(huì )發(fā)現系統的信噪比(SNR)會(huì )影響在遠距離(100米至300米)檢測小型目標的能力。ADC噪底不能超過(guò)接收路徑中的其他噪聲源。如果背景光或散粒噪聲貢獻因素低于A(yíng)DC的噪底或印刷電路板(PCB)噪聲,系統精度就會(huì )受限。采用直接飛行時(shí)間(ToF)法要求系統可以輸出短脈沖(~1 ns至5 ns),且使用高采樣速率ADC檢測這些脈沖。采樣速率達到1 GSPS,即可滿(mǎn)足接收信號鏈路需求。此外,請注意,ADC的有效位數(ENOB)必須支持跨阻放大器(TIA)的整個(gè)輸出范圍,不能對信號實(shí)施削波。
系統需要檢測100米開(kāi)外的籃球嗎?確定相關(guān)對象的反射率、尺寸和距離,會(huì )決定TIA的SNR需求。與ADC相同,TIA也需要檢測同樣的窄脈沖。因為系統需要處理的對象的距離、反射率和尺寸范圍甚廣,所以TIA必須能夠在飽和后中快速恢復。高反射(比如交通標志怕愛(ài))或近距離目標能反射強光而造成TIA飽和,。這些都是常見(jiàn)事件,而系統恢復的速度(以盡量減少致盲時(shí)間)對于安全性至關(guān)重要。

圖3.LIDAR電氣架構。
系統的視場(chǎng)和角分辨率也會(huì )影響到檢測一個(gè)籃球的能力。發(fā)射和接收光學(xué)是決定視場(chǎng)的主要因素。角分辨率決定您能遠距離檢測籃球大小的目標并進(jìn)行分類(lèi),還是只能檢測目標的存在。
對于LIDAR系統設計人員來(lái)說(shuō),處理這些系統的功耗和散熱是不小的挑戰。當然,降低信號鏈的功耗會(huì )相應降低產(chǎn)生的熱量。組件在的性能隨溫度會(huì )出現大幅變化,其中更敏感的一些組件可能需要溫度補償。使用熱電控制器是一種不錯的方法,可以高度準確地對IC進(jìn)行冷卻或加熱。如果追求精確的話(huà),發(fā)光和感光二極管都需要溫度補償,以在LIDAR系統的工作溫度范圍內保持穩定的工作波長(cháng)和效率。
在某些情況下,對雪崩光電二極管和激光器施加的偏置電壓要到幾百伏(正壓或負壓)。高效生成這些電壓,且使用盡可能少的組件,是最佳設計實(shí)踐所追求的。要提供準確的基準電壓源,需要使用精密數模轉換器(DAC)生成偏置點(diǎn)、電流和電壓。沿著(zhù)傳統的1.8 V至12 V電壓域,LIDAR系統對電壓的需求是有所增加的。小心選擇電源解決方案可以處理這一問(wèn)題,尤其是解決方案中額外添加一種電壓時(shí)。選擇具備關(guān)斷或低功率模式的IC和電源也非常重要,這樣的系統可以靈活高能效地輪詢(xún)多個(gè)通道。
集成LIDAR傳感器的IMU具備多種優(yōu)勢。IMU傳感器智能地融合多軸陀螺儀和加速度計,為除震和導航應用提供可靠的位置和運動(dòng)識別。即使在復雜的操作環(huán)境下,面臨極限運動(dòng)動(dòng)力學(xué)問(wèn)題時(shí),精密微機電系統(MEMS) IMU也能提供所需的精度。
IMU為自動(dòng)駕駛系統提供航位推測、定位和穩定功能。反過(guò)來(lái),在A(yíng)DAS或GPS性能下降,或者不可用時(shí),上述功能又能為系統提供可靠的數據。IMU能夠有效利用高更新速率(每秒數千個(gè)樣本),且可以不受外部環(huán)境變化干擾。IMU越穩定,越能長(cháng)時(shí)間為系統提供關(guān)鍵且可靠的航跡信息。
IMU可以直接集成到LIDAR模塊中,用于檢測、分析和糾正車(chē)輛運行環(huán)境中常見(jiàn)的振動(dòng)。例如,IMU輸出可輔助拼接LIDAR點(diǎn)云,否則,這些點(diǎn)云會(huì )因為車(chē)輛越過(guò)路面坑洼而出現偏離。此外,還可以使用IMU檢測旋轉式LIDAR系統的軸承磨損,以在實(shí)際出現故障之前維修LIDAR,提高安全性。
結論
在最初產(chǎn)品定義期間,需要考慮LIDAR系統的復雜性,以確定可接受的SNR、檢測要求、視野、散熱限制以及功耗。了解哪些組件是各個(gè)問(wèn)題的主要貢獻因素,同時(shí)謹慎選擇IC,可以大大提高設計的成功幾率。
作者簡(jiǎn)介
Sarven Ipek于2006年加入ADI公司。在A(yíng)DI公司任職期間,Sarven在故障分析、設計、特性表征、產(chǎn)品工程、項目管理和程序管理方面積累了豐富的經(jīng)驗。Sarven目前是ADI公司麻薩諸塞州威明頓市自動(dòng)駕駛和安全產(chǎn)品部門(mén)LIDAR部的營(yíng)銷(xiāo)經(jīng)理。
他擁有東北大學(xué)電氣和計算機工程學(xué)士學(xué)位以及電氣工程碩士學(xué)位,主修通信系統和信號處理。
推薦閱讀:



