
【導讀】電機在各種工業(yè)、汽車(chē)和商業(yè)領(lǐng)域應用廣泛。電機由驅動(dòng)器控制,驅動(dòng)器通過(guò)改變輸入功率來(lái)控制其轉矩、速度和位置。高性能電機驅動(dòng)器可以提高效率,實(shí)現更快速、更精確的控制。高級電機控制系統集控制算法、工業(yè)網(wǎng)絡(luò )和用戶(hù)接口于一體,因此需要更多處理能力來(lái)實(shí)時(shí)執行所有任務(wù)?,F代電機控制系統通常利用多芯片架構來(lái)實(shí)現:數字信號處理器(DSP)執行電機控制算法,FPGA 實(shí)現高速 I/O 和網(wǎng)絡(luò )協(xié)議,微處理器處理執行控制1。
隨著(zhù)片上系統(SoC)的出現,例如集 CPU 的靈活性與 FPGA 的處 理能力于一體的 Xilinx® Zynq All Programmable SoC,設計人員終于能夠將電機控制功能和其他處理任務(wù)納入單個(gè)器件中??刂扑惴?、網(wǎng)絡(luò )和其他處理密集型任務(wù)被分流到可編程邏輯,而管理控制、系統監控與診斷、用戶(hù)接口以及調試則由處理單元處理??删幊踢壿嬁梢园鄠€(gè)并行工作的控制內核,以實(shí)現多軸機器或多重控制系統。由于在單芯片上實(shí)現了完整的控制器,因此硬件設計可以更簡(jiǎn)單、更可靠、更便宜。
近年來(lái),在 MathWorks®Simulink®等軟件建模與仿真工具的推動(dòng)下,基于模型的設計已發(fā)展成為完整的設計流程——從模型創(chuàng )建到實(shí)現2 ?;谀P偷脑O計 改變了工程師和科學(xué)家的工作方式,把設計任務(wù)從實(shí)驗室和現場(chǎng)轉移到桌面?,F在,包括工廠(chǎng)和控制器在內的整個(gè)系統都可以建模,工程師可以先調整好控制器的行為,再將其部署到現場(chǎng)。這樣就能降低受損風(fēng)險,加速系統集成,減少對設備供貨的依賴(lài)。一旦完成控制模型,Simulink 環(huán)境便可將其自動(dòng)轉換為由控制系統運行的 C 和 HDL 代碼,節省時(shí)間并避免人工編程錯誤。將系統模型鏈接到快速原型開(kāi)發(fā)環(huán)境可進(jìn)一步降低風(fēng)險,因為后者允許觀(guān)察控制器在實(shí)際條件下會(huì )如何運作。
一個(gè)可實(shí)現更高電機控制性能的完整開(kāi)發(fā)環(huán)境利用 Xilinx Zynq SoC 實(shí)現控制器,MathWorks Simulink 用于進(jìn)行基于模型的設計 和自動(dòng)生成代碼,ADI 公司的 智能驅動(dòng)器套件用于快速開(kāi)發(fā)驅動(dòng)系統原型。
Xilinx FPGA 與 SoC 電機控制解決方案
高級電機控制系統必須全面執行控制、通信和用戶(hù)接口任務(wù),每 種任務(wù)都有不同的處理帶寬要求和實(shí)時(shí)約束。為了實(shí)現這樣的控 制系統,所選的硬件平臺必須魯棒且可擴展,以便為將來(lái)的系統 改進(jìn)和擴張創(chuàng )造條件。Zynq All Programmable SoC 集高性能處理 系統與可編程邏輯于一體,滿(mǎn)足上述要求(如圖 1 所示)。這種 組合可提供出色的并行處理能力、實(shí)時(shí)性能、快速計算和靈活的 連接。該 SoC 集成了兩個(gè) Xilinx 模數轉換器(XADC),用于監控 系統或外部模擬傳感器。
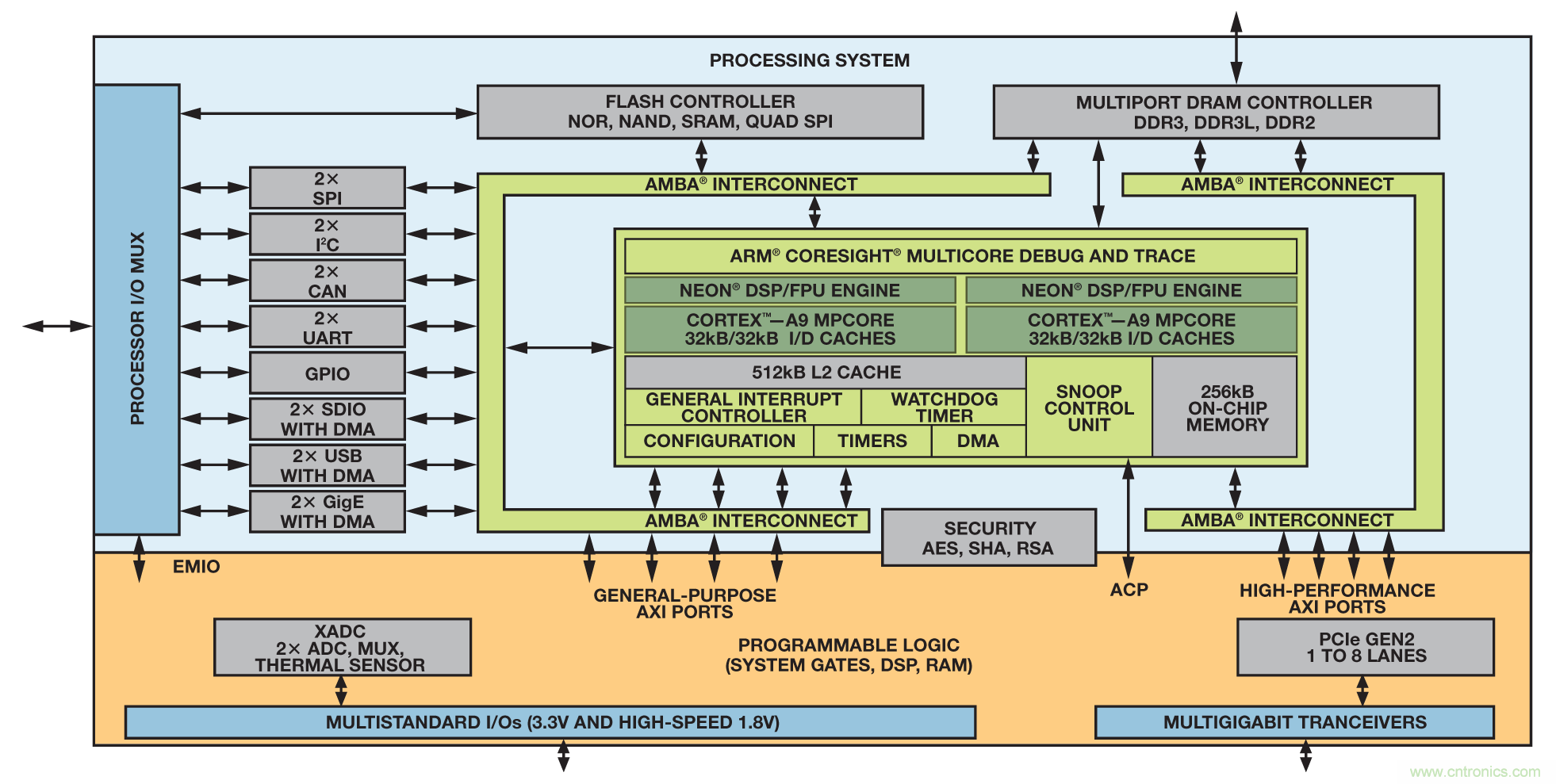
圖 1. Xilinx Zynq SoC 功能框圖
Zynq 包括一個(gè)雙核 ARM Cortex-A9 處理器、一個(gè) NEON 協(xié)處理 器和多個(gè)用于加速軟件執行的浮點(diǎn)擴展單元。處理系統處理管理 控制、運動(dòng)控制、系統管理、用戶(hù)接口和遠程維護等任務(wù),這些 功能非常適合通過(guò)軟件實(shí)現。為了發(fā)揮系統的能力,可以采用嵌 入式 Linux 或實(shí)時(shí)操作系統??梢允褂米越o自足的處理器,而無(wú) 需配置可編程邏輯。這樣,軟件開(kāi)發(fā)人員編寫(xiě)代碼與硬件工程師 設計 FPGA 結構可以同時(shí)進(jìn)行。
在可編程邏輯方面,該器件擁有多達 444,000 個(gè)邏輯單元和 2200 個(gè) DSP Slice,可提供巨大的處理帶寬。FPGA 結構可擴展,因而 用戶(hù)的選擇范圍很廣——從包含 28,000 個(gè)邏輯單元的小型器件到 支持最具挑戰性的信號處理應用的高端器件。5 個(gè) AMBA-4 AXI 高速互連將可編程邏輯緊密地耦合到處理系統,提供相當于 3000 以上引腳的有效帶寬??删幊踢壿嬤m合執行時(shí)間關(guān)鍵的處理密集 型任務(wù),如實(shí)時(shí)工業(yè)以太網(wǎng)協(xié)議等,而且它支持多個(gè)控制內核并 行工作,以實(shí)現多軸機器或多重控制系統。
基于 Xilinx All Programmable SoC 的解決方案和平臺滿(mǎn)足當今復 雜控制算法(如磁場(chǎng)定向控制 FOC)和復雜調制方案(如 Xilinx 和 Qdesys 設計的再生脈沖頻率調制器3 )所提出的關(guān)鍵時(shí)序和性 能要求。
利用 MathWorks Simulink 實(shí)現基于模型的設計
Simulink 是一種支持多域仿真和基于模型設計的框圖環(huán)境,非常 適合對包括控制算法和工廠(chǎng)模型的系統進(jìn)行仿真。為了實(shí)現精確 定位等目的,電機控制算法會(huì )調節速度、轉矩和其他參數。利用 仿真評估控制算法可以有效地確定電機控制設計是否合適,判斷 其合適后再進(jìn)行昂貴的硬件測試,從而減少算法開(kāi)發(fā)的時(shí)間和成 本。圖 2 給出了設計電機控制算法的有效工作流程:
● 構建精確的控制器和工廠(chǎng)模型,常常是根據電機、驅動(dòng)電子、傳感器和負載的資源庫
● 對系統行為進(jìn)行仿真以驗證控制器的表現是否符合預期
● 產(chǎn)生 C 代碼和 HDL 進(jìn)行實(shí)時(shí)測試和實(shí)施
● 利用原型硬件測試控制算法
● 在原型硬件上進(jìn)行仿真和測試后,如果控制系統證明令人滿(mǎn)意,則將控制器部署到最終生產(chǎn)系統上
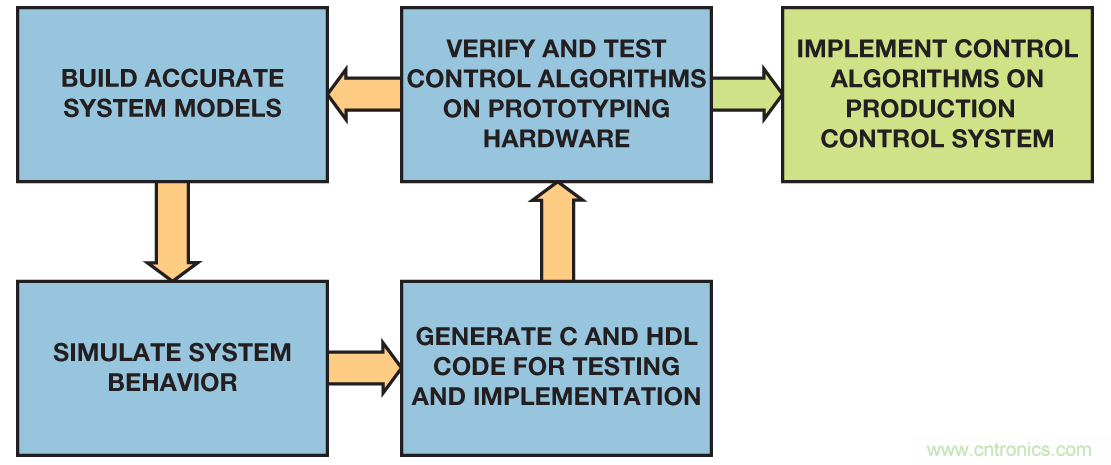
圖 2. 電機控制算法設計的工作流程
MathWorks產(chǎn)品包括Control System Toolbox,™ SimPowerSystems,™ 和 Simscape™ 提供工業(yè)標準算法和應用程序以對線(xiàn)性控制系統 進(jìn)行系統化分析、設計和調諧,此外還有元件庫和分析工具,用 于對機械、電氣、液壓和其他物理領(lǐng)域的各種系統進(jìn)行建模和仿 真。利用這些工具可以創(chuàng )建高保真的工廠(chǎng)和控制器模型,進(jìn)而驗 證控制系統的行為和性能,成功之后方移交實(shí)際實(shí)施。該仿真環(huán) 境是驗證極端功能情形和工作狀況的理想場(chǎng)所,確??刂破饕褳?這些狀況做好準備,并且其實(shí)際操作對設備和工作人員都將是安 全的。
一旦控制系統在仿真環(huán)境中完成了全面驗證,就可以利用嵌入式 轉碼器和 HDL 轉碼工具將其轉換為 C 代碼和 HDL,并部署到原 型硬件上進(jìn)行測試,然后部署到最終生產(chǎn)系統上。此時(shí)要指定定 點(diǎn)和時(shí)序行為等軟硬件實(shí)施要求。自動(dòng)生成代碼有助于縮短從概 念到實(shí)際系統實(shí)現所需的時(shí)間,消除編程錯誤,確保實(shí)際結果與 模型相符。圖 3 給出了在 Simulink 中進(jìn)行電機控制器建模并將其 轉移到最終生產(chǎn)系統所需的實(shí)際步驟。
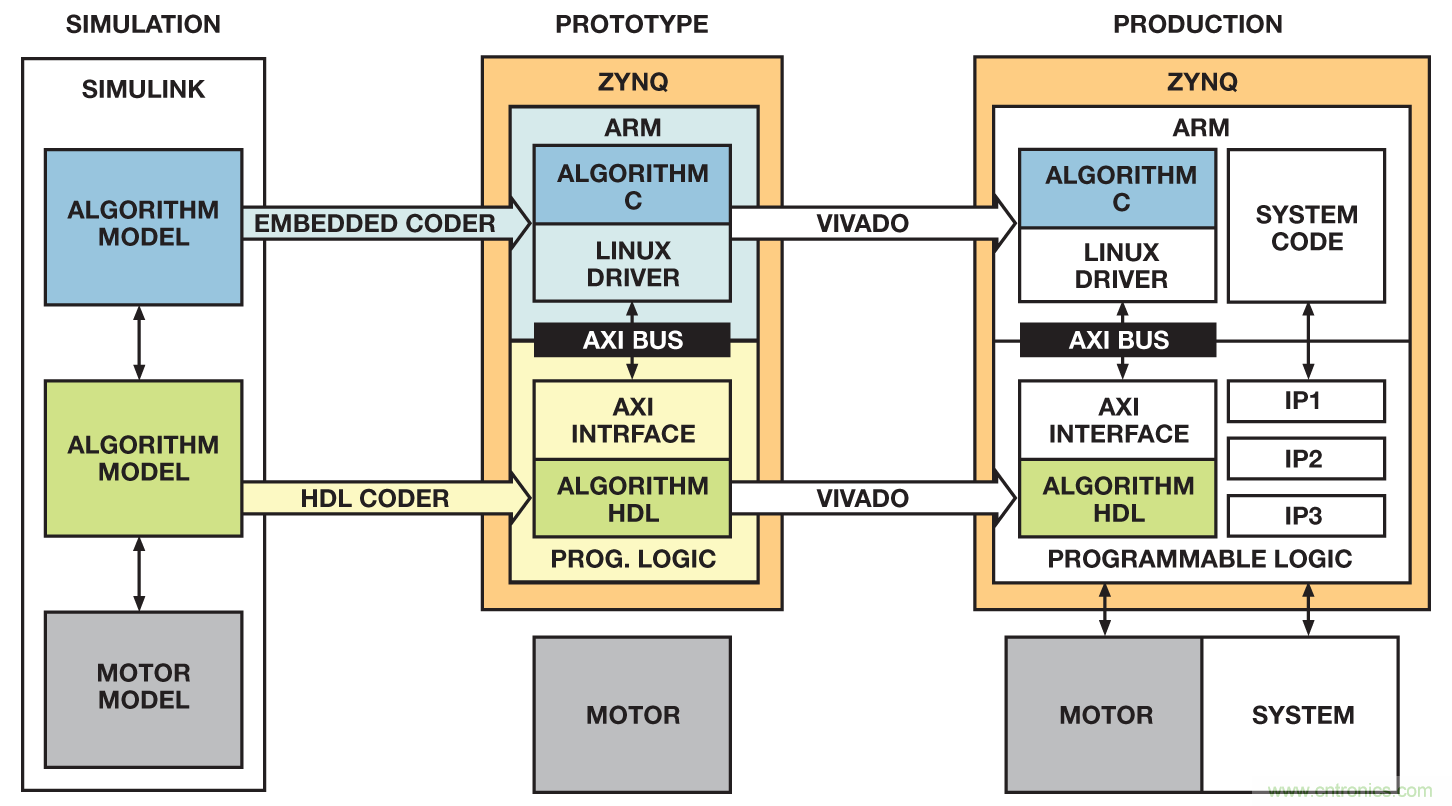
圖 3. 從仿真到生產(chǎn)的過(guò)程
第一步是在 Simulink 中對控制器和工廠(chǎng)進(jìn)行建模和仿真。在這一 階段,控制器算法被劃分為在軟件中實(shí)現的模塊和在可編程邏輯 中實(shí)現的模塊。劃分和仿真完成后,利用嵌入式轉碼器和 HDL 轉碼器將控制器模型轉換為 C 代碼和 HDL?;?Zynq 的原型系 統驗證控制算法的性能,并且幫助進(jìn)一步調諧控制器模型,然后 轉移到生產(chǎn)階段。在生產(chǎn)階段,將自動(dòng)生成的 C 代碼和 HDL 集 成到復雜的生產(chǎn)系統框架中。此工作流程確??刂扑惴ㄔ谶_到 生產(chǎn)階段之前經(jīng)過(guò)全面驗證和測試,使得系統魯棒性具有高可 信度。
利用 ADI 公司智能驅動(dòng)器套件快速完成原型開(kāi)發(fā)
選擇合適的原型開(kāi)發(fā)硬件是設計過(guò)程的一個(gè)主要步驟。ADI 公司 的智能驅動(dòng)器套件支持快速、高效的原型開(kāi)發(fā)。AvnetZynq-7000 All Programmable SoC/Analog Devices智能驅動(dòng)器套件將 Zynq- 7000 All Programmable SoC ARM 雙核 Cortex-A9 + 28 nm 可編程 邏輯與 ADI 公司最新一代高精度數據轉換器和數字隔離相 結合,可實(shí)現高性能電機控制和雙通道千兆以太網(wǎng)工業(yè)網(wǎng)絡(luò )連 接。該套件帶有 Avnet ZedBoard 7020 基板和 ADI 公司的 AD-FMCMOTCON1-EBZ 模塊,構成一個(gè)完整的驅動(dòng)系統,能夠 高效控制多種類(lèi)型的電機。另外,該套件可以利用 ADI 公司的 AD-DYNO1-EBZ 測功器驅動(dòng)系統,進(jìn)行擴展,后者是一個(gè)動(dòng)態(tài)可調 的負載,可用來(lái)測試實(shí)時(shí)電機控制性能。AD-FMCMOTCON1-EBZ 模塊由控制器和驅動(dòng)板組成,如圖 4 所示。
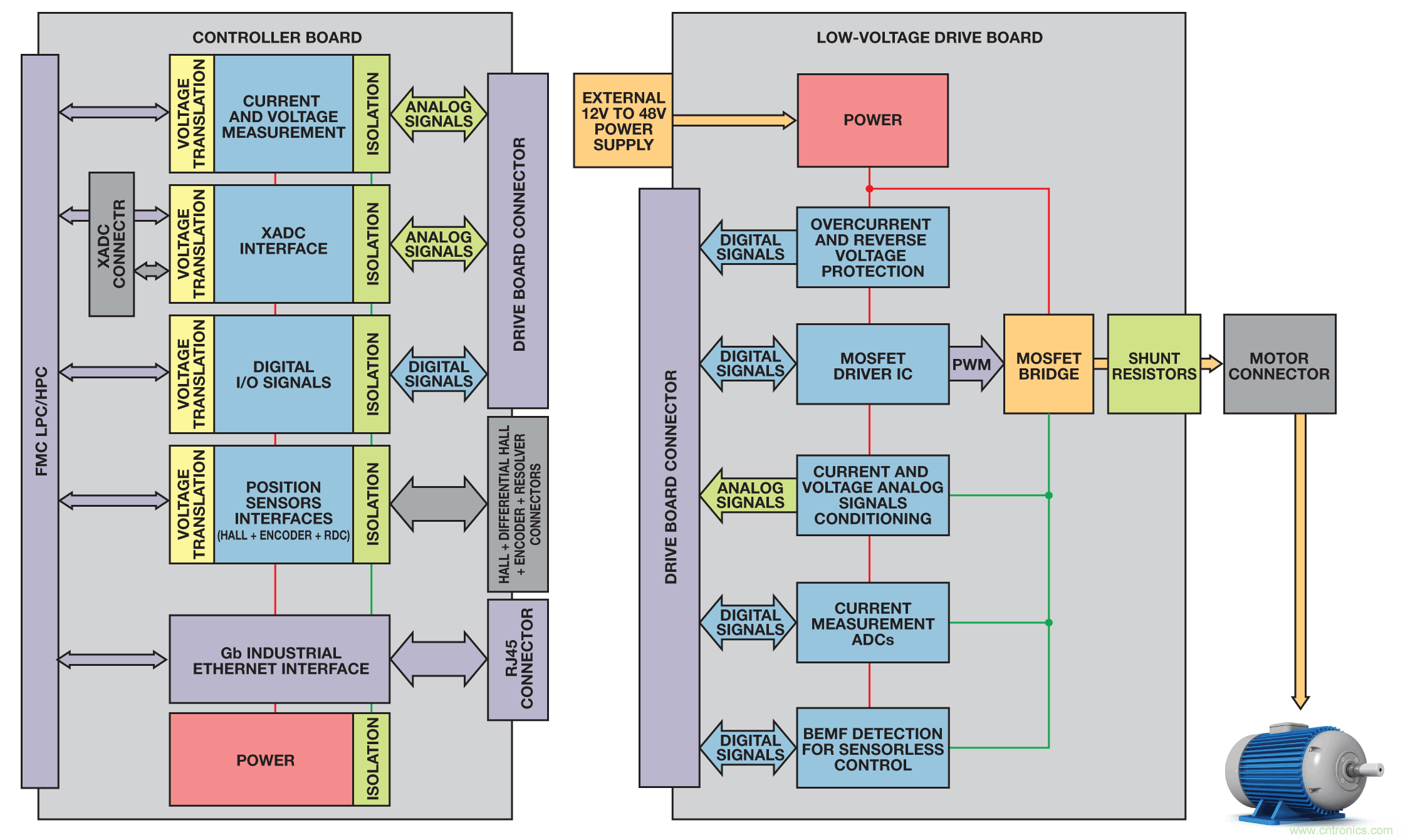
圖 4. AD-FMCMOTCON1-EBZ 功能框圖
控制板是一個(gè)混合信號 FPGA 夾層卡 (FMC),可利用低引腳數 (LPC) 或高引腳數 (HPC) FMC 連接器連接到任何 Xilinx FPGA 或 SoC 平臺。它具有以下特性:
● 利用隔離式 ADC 測量電流和電壓
● 隔離式 Xilinx XADC 接口
● 完全隔離的數字控制和反饋信號
● 霍爾、差分霍爾、編碼器和旋變器接口
● 2 個(gè)千兆以太網(wǎng)物理層,支持 EtherCAT、ProfiNET、Ethernet/IP或 Powerlink 等高速工業(yè)通信協(xié)議
● FMC 信號電壓自適應接口,支持在所有 FMC 電壓電平上無(wú)縫工作
隔離是任何電機控制系統的一個(gè)關(guān)鍵方面,其目的是保護控制器 和用戶(hù)??刂瓢迳夏M和數字信號的完全隔離,確保 FPGA 平臺 永遠不受電機驅動(dòng)側可能產(chǎn)生的危險電壓影響。
驅動(dòng)板包含驅動(dòng)電機以及電流電壓檢測與保護電路所需的全部電源電子。該板具有以下特性:
● 以最大 18 A 電流驅動(dòng) 12 V 至 48 V 范圍的 BLDC(無(wú)刷直流)/PMSM(永磁同步電機)/有刷直流/步進(jìn)電機
● 動(dòng)態(tài)制動(dòng)功能和集成式過(guò)流與反向電壓保護
● 利用隔離式 ADC 測量相電流;可編程增益放大器使電流測量輸入范圍達到最大
● 向控制板提供直流總線(xiàn)電壓、相電流和總電流反饋信號
● 集成 BEMF 過(guò)零檢測,用于實(shí)現 PMSM 或 BLDC 電機的無(wú)傳感器控制
測功器是一個(gè)動(dòng)態(tài)可調的負載,可用于測試實(shí)時(shí)電機控制性 能,由兩臺 BLDC 電機通過(guò)剛性連接直接耦合而成。其中一臺 BLDC 電機用作負載,由測功器的嵌入式控制系統控制,而另 一臺由 ADI 公司的智能驅動(dòng)器套件驅動(dòng),如圖 5 所示。該系統 配有一個(gè)用戶(hù)界面,用于顯示有關(guān)負載電流和速度的信息,并 支持設置不同的負載曲線(xiàn)。要實(shí)現外部控制,可利用 Analog Discovery USB 示波器捕捉負載信號;要從 MATLAB®直接控 制,可使用 MathWorks Instrument Control Toolbox™。
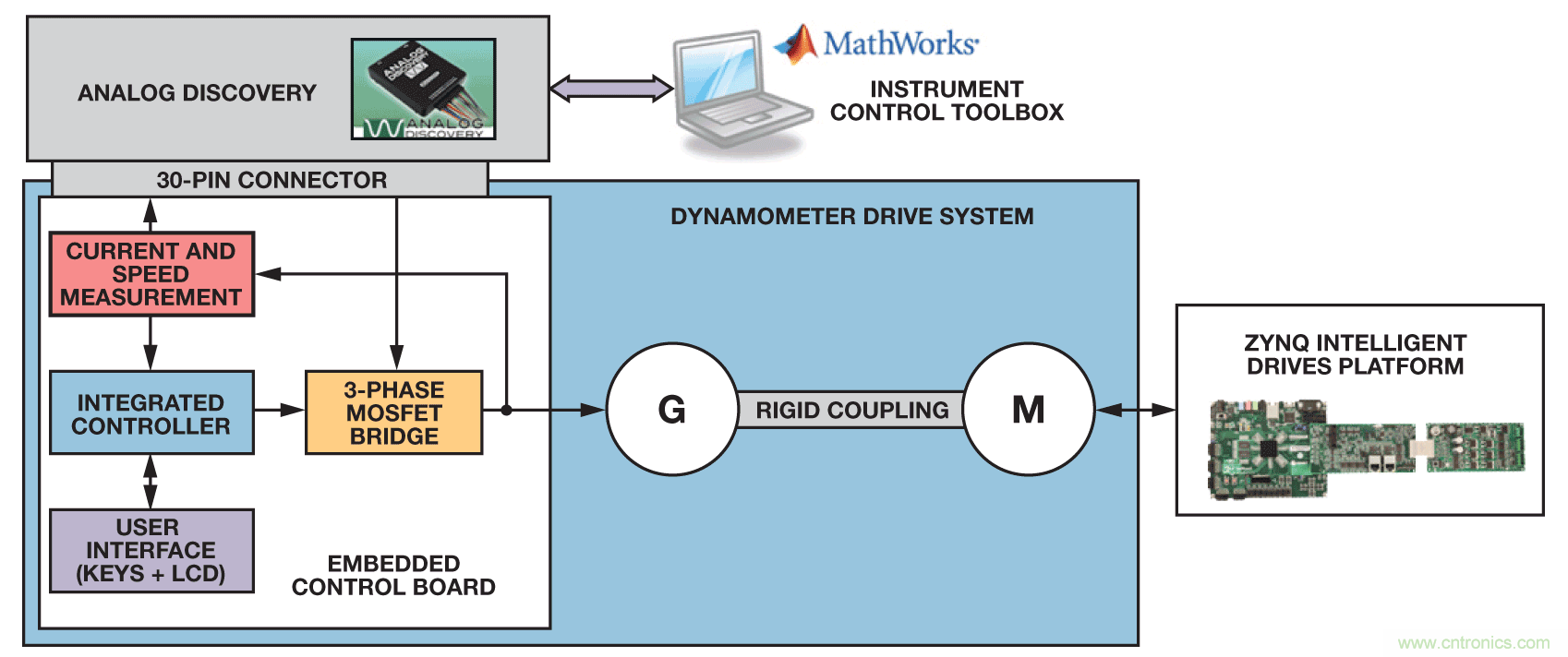
圖 5. 測功器驅動(dòng)系統
電機電流和電壓測量的質(zhì)量對電機控制系統的性能有很大影響。 通過(guò)利用高性能模擬信號調理器件和 ADC,ADI 公司智能驅動(dòng) 器套件提供精密電流和電壓測量。測量路徑分為控制器和驅動(dòng)板 兩部分,如圖 6 所示。

圖 6. 相電流信號鏈
相電流通過(guò)測量分流電阻上的電壓來(lái)檢測。取決于 ADC 是否靠 近分流電阻,有兩條可能的測量路徑可以獲得最高測量精度。如 果 ADC 靠近分流電阻,則信號路徑非常短,不易受到噪聲耦合 影響。分流電阻上的小差分電壓由隔離式Σ-Δ調制器AD7401直 接測量,而無(wú)需其他接口和信號調理電路。如果 ADC 遠離分流 電阻,則信號路徑很長(cháng),容易受到噪聲耦合影響,尤其是電源開(kāi) 關(guān)噪聲和電機的噪聲耦合。必須采取特別措施確保 ADC 與分流 電阻之間的 PCB 走線(xiàn)和信號調理電路受到適當的屏蔽。分流電 阻上的小差分電壓被驅動(dòng)板上的差動(dòng)放大器AD8207 放大,后者 置于分流電阻附近以避免噪聲耦合。信號從±125 mV 滿(mǎn)量程輸 入范圍放大至±2.5 V 范圍,以最大程度地降低耦合噪聲的影 響。放大后的信號又經(jīng)過(guò)一個(gè)采用可編程增益儀表放大器(PGIA)AD8251的放大級,以確保 ADC 始終接收到經(jīng)過(guò)適當縮放以適應 輸入范圍的輸入信號。放大后的模擬信號經(jīng)過(guò)連接器進(jìn)入控制 板。連接器會(huì )屏蔽每個(gè)模擬信號,以降低噪聲耦合影響。來(lái)自驅 動(dòng)板的模擬信號利用運算放大器ADA4084-2重新轉換到AD7401輸入范圍。
電流和電壓反饋信號鏈中的最重要器件是二階隔離式Σ-Δ調制 器 AD7401A。這款高性能 ADC 具有 16 位分辨率(無(wú)失碼)、 13.3有效位數(ENOB)和 83 dB SNR。2線(xiàn)數字接口包括一個(gè) 20 MHz 時(shí)鐘輸入和一個(gè) 1 位數字位流輸出。ADC 輸出利用 sinc3 數字濾 波器重構。數據手冊中提供了一個(gè)針對 16 位輸出和 78 kHz 采樣 速率的濾波器模型和 HDL 實(shí)現方案。輸出分辨率和采樣速率可 通過(guò)改變?yōu)V波器模型和抽取來(lái)控制。78 kHz 采樣速率對許多應用 可能是足夠的,但某些情況需要更高的速率。這些情況下,可利 用圖 7 所示的濾波器庫來(lái)將系統采樣速率提至最高 10 MSPS (真 16 位數據)。濾波器庫包含 n 個(gè) sinc3濾波器,其采樣時(shí)鐘 延遲 T(即 sinc3濾波器傳播時(shí)間除以 n)的倍數。數據選擇器以 周期T輸出 ADC 碼。
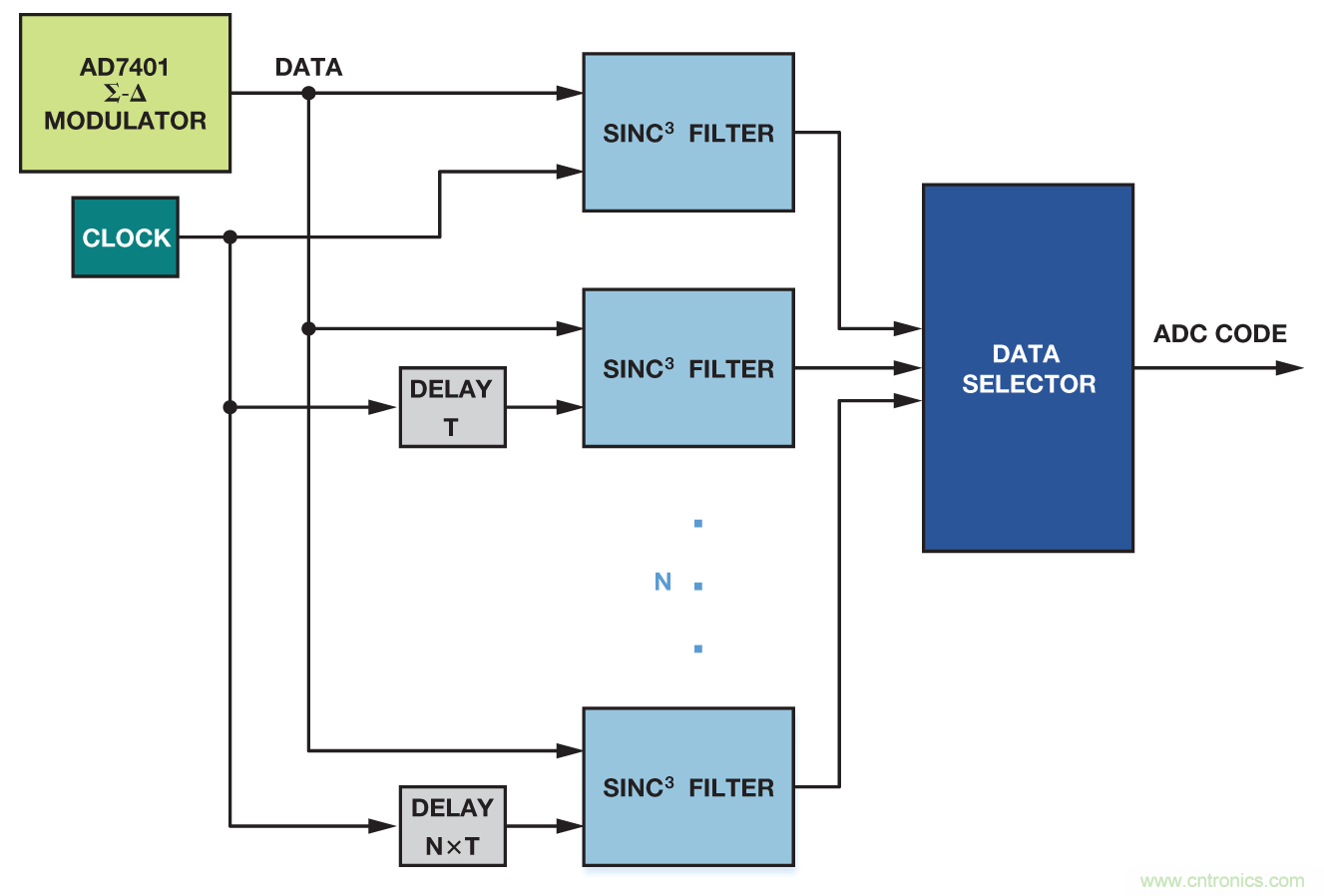
圖 7. 濾波器庫
相電流測量也可以由 Zynq XADC 執行。XADC 信號測量鏈使用 常規測量鏈的完整路徑,并在 AD7401 Σ-Δ調制器之后增加一 個(gè) Sallen-Key 模擬重構濾波器。該濾波器是在控制板上利用運算 放大器AD8646實(shí)現,如圖 8 所示。隔離式Σ-Δ調制器和模擬重構濾波器的組合為實(shí)現 XADC 輸入信號的模擬隔離提供了一種便利、低成本的方法,同時(shí)不影響測量質(zhì)量。

圖8. XADC 信號測量鏈
ADI 公司智能驅動(dòng)器套件帶有一套 Simulink 控制器模型、完整的Xilinx Vivado 框架和 ADI Linux 基礎設施,便于用戶(hù)完成電機控制系統設計所需的全部步驟——從仿真開(kāi)始,經(jīng)過(guò)原型開(kāi)發(fā),最終在生產(chǎn)系統上實(shí)現。
可以利用兩個(gè)控制器模型(一個(gè)六步控制器和一個(gè) PMSM 磁場(chǎng)定向控制器)來(lái)啟動(dòng)設計過(guò)程。圖 9 顯示了這兩個(gè)控制器的高級視圖。六步控制器實(shí)現一個(gè)用于 BLDC 電機的梯形控制器;FOC控制器提供一個(gè) FOC 內核以便集成到控制系統中。
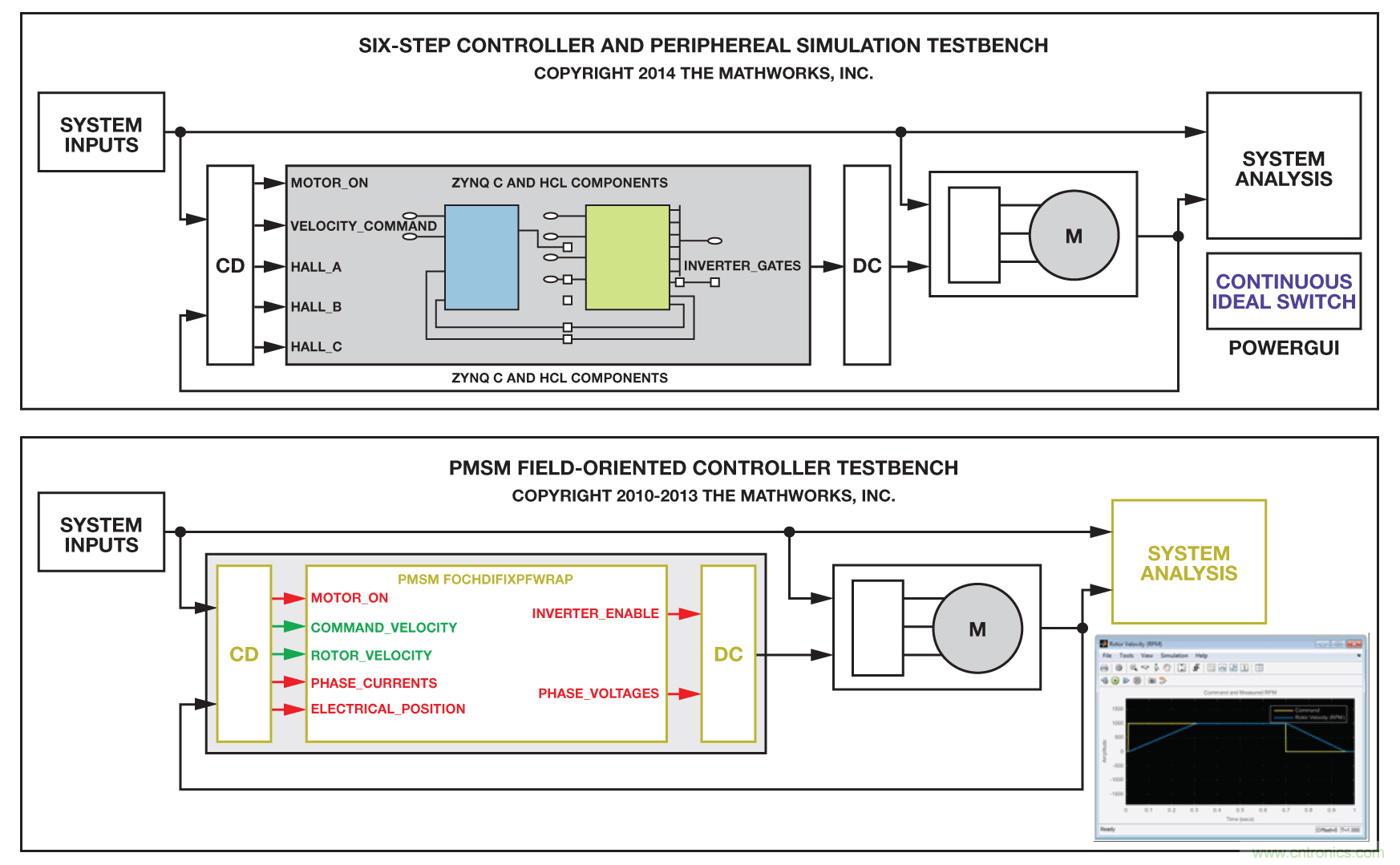
圖 9. Simulink 控制器模型
工廠(chǎng)和控制器模型在仿真階段創(chuàng )建,通過(guò)完整系統的行為仿真來(lái)驗證控制器符合預期??刂破髂P蛣澐譃橛?C 代碼和 HDL 實(shí)現的多個(gè)部分,并指定時(shí)序、定點(diǎn)實(shí)現、采樣速率和環(huán)路時(shí)間等約束條件以確??刂破髂P偷男袨榕c在硬件實(shí)現中一樣。圖 10 顯示了六步控制器的軟件和 HDL 劃分。

圖 10. 控制器的 C 代碼和 HDL 劃分
一旦控制器在仿真中經(jīng)過(guò)全面驗證,下一步便是在硬件平臺上制作原型。針對 ARM 內核和可編程邏輯,Zynq SoC 引導工作流程從劃分為多個(gè)子系統的 Simulink 模型產(chǎn)生 C 代碼和 HDL。利用此工作流程,HDL 轉碼器生成針對可編程邏輯的 HDL,嵌入式轉碼器則生成針對 ARM 的 C 代碼。MathWorks Zynq 支持包支持從模型生成由算法 C 代碼組成的 ARM 可執行文件(與 AXI 總線(xiàn)接口),并支持從模型生成由 HDL 代碼組成的位流(與可編程邏輯引腳和 AXI 總線(xiàn)接口)。圖 11 顯示了控制器實(shí)現及其與ADI 智能驅動(dòng)器硬件的關(guān)系。

圖 11. 原型系統上的控制器實(shí)現
一旦將位流和可執行文件加載到硬件中,就可以開(kāi)始控制器的運行測試。利用 Simulink 與運行開(kāi)源 Linux OS 的嵌入式系統之間的以太網(wǎng)鏈路執行硬件在環(huán)(HIL)測試。軸轉速等電機參數可以在 Simulink 中捕捉,并與仿真結果相比較,確保實(shí)際系統實(shí)現與模型相符。一旦控制算法測試完畢,便可將控制器轉移到生產(chǎn)系統上。
除了智能驅動(dòng)器套件以外,ADI 公司還提供完整的 Vivado 框架和 Linux 基礎設施以用于原型開(kāi)發(fā)和最終生產(chǎn)。圖 12 顯示了支持智能驅動(dòng)器套件的 Zynq 基礎設施。該高級框圖說(shuō)明了 ADI 參考設計在 Xilinx Zynq SoC 上是如何劃分的??删幊踢壿媽?shí)現 IP內核,用于與 ADC、位置傳感器和電機驅動(dòng)級接口。由 HDL 轉碼器生成的 HDL 代表電機控制算法,集成到 ADI 公司 IP 中。所有 IP 都有低速 AXI-Lite 接口用于配置和控制,并有高速 AXIStreaming接口用于通過(guò) DMA 通道向軟件傳輸實(shí)時(shí)數據。高速以太網(wǎng)接口可以利用 ARM 處理系統的硬 MAC 外設或可編程邏輯中的 Xilinx 以太網(wǎng) IP 實(shí)現。
ARM Cortex A9 處理系統運行 ADI 公司提供的 Ubuntu Linux,其中包括:與 ADI 公司智能驅動(dòng)器硬件接口所需的 Linux IIO 驅動(dòng),用于監測和控制的IIO Oscilloscope(示波器)用戶(hù)空間應用程序,支持實(shí)時(shí)數據采集和通過(guò) TCP 控制系統的libiio服務(wù)器,在遠程計算機上運行的客戶(hù)端,以及整合嵌入式轉碼器所生成 C代碼的可選用戶(hù)應用程序。
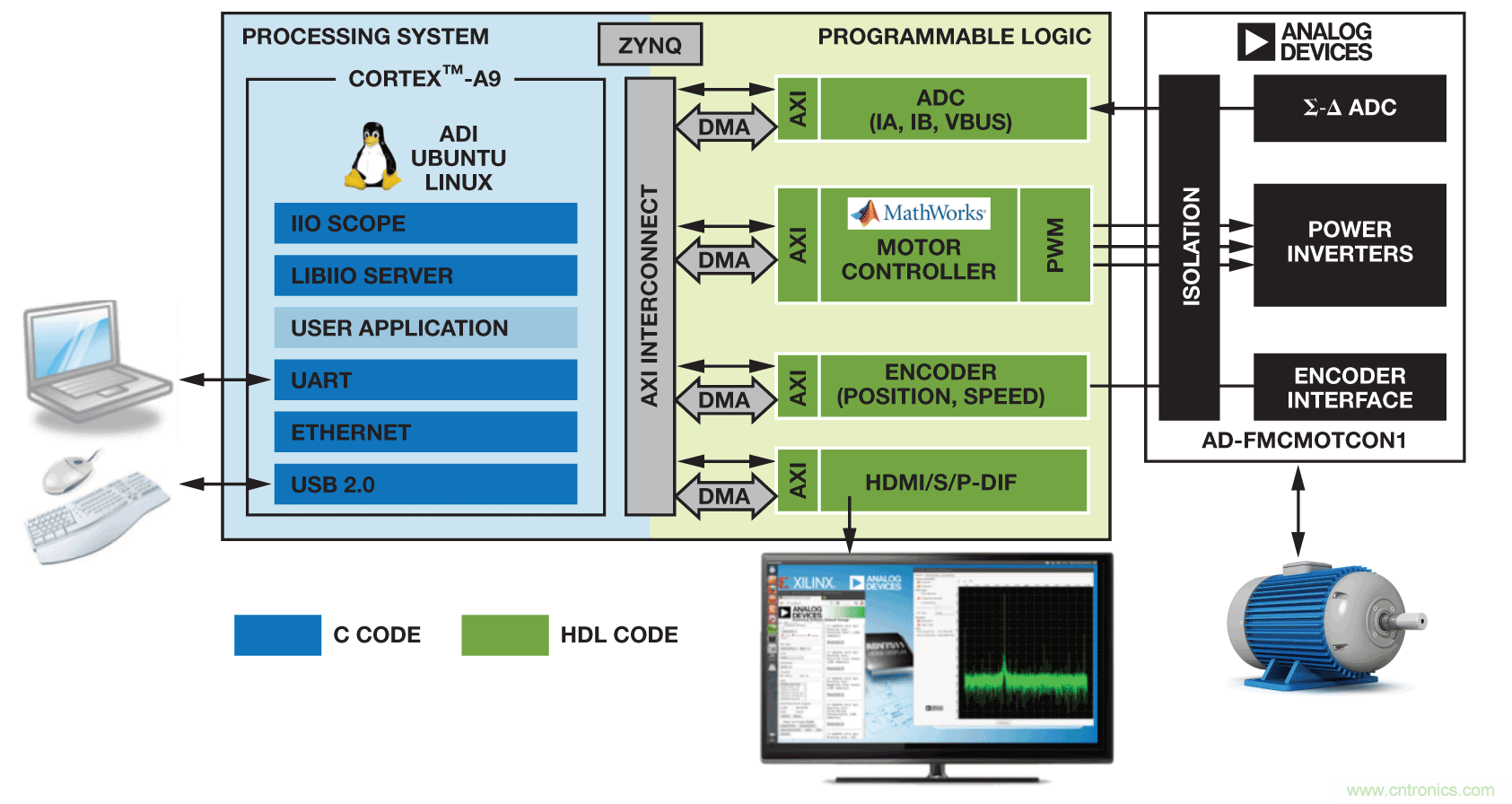
圖 12. ADI Linux 基礎設施
所有 ADI Linux 驅動(dòng)均基于 Linux 工業(yè) I/O(IIO)子系統,其現已包括在所有主流 Linux 內核中。IIO Scope 是 ADI 公司開(kāi)發(fā)的一款開(kāi)源 Linux 應用程序,運行在 Xilinx Zynq 中的雙核 ARMCortex A9 上,能夠顯示連接到 Xilinx Zynq 平臺的 ADI FMC 卡所獲取的實(shí)時(shí)數據。這些數據可以在時(shí)域中、頻域中或以星座圖的形式顯示。支持以不同的常用文件格式(如逗號分隔值或.matMatlab 文件等)保存所捕獲的數據以供進(jìn)一步分析。IIO Scope提供一個(gè)圖形用戶(hù)界面,用于更改或讀取 ADI FMC 卡的配置。
libiio 服務(wù)器支持實(shí)時(shí)數據采集、通過(guò) TCP 控制系統以及運行于遠程計算機上的客戶(hù)端。服務(wù)器運行于 Linux 下的嵌入式目標上,通過(guò) TCP 管理目標與遠程客戶(hù)端之間的實(shí)時(shí)數據交換。IIO客戶(hù)端可以作為系統對象集成到 MATLAB 和 Simulink 原生應用程序中。一路 HDMI 輸出用于在監視器上顯示 Linux 界面,鼠標和鍵盤(pán)可通過(guò) USB 2.0 端口連接到系統。
ADI 公司為智能驅動(dòng)器套件提供的 Linux 軟件和 HDL 基礎設施,連同 MathWorks 和 Xilinx 提供的工具,非常適合開(kāi)發(fā)電機控制應用原型。它們還包含適用于生產(chǎn)的組件,可將其集成到最終控制系統中,從而減少從概念到生產(chǎn)所需的時(shí)間和成本。
結論
本文說(shuō)明了采用 FPGA 的現代電機控制系統的要求和趨勢,以及為滿(mǎn)足這些約束條件和幫助實(shí)現更高效、更精確的電機控制解決方案,MathWorks、Xilinx 和 ADI 公司帶給市場(chǎng)的工具和系統。通過(guò)將 MathWorks 基于模型的設計和自動(dòng)生成代碼工具與強大的Xilinx Zynq SoC、ADI 公司的隔離、功率、信號調理和測量解決方案相結合,電機驅動(dòng)系統的設計、驗證、測試和實(shí)現可以比以前更有效率,進(jìn)而提高電機控制性能并縮短上市時(shí)間。ADI 公司智能驅動(dòng)器套件與 Avnet Zynq-7000 All Programmable SoC 配合使用,為利用 MathWorks Simulink 設計的電機控制算法提供出色的原型開(kāi)發(fā)環(huán)境。該智能驅動(dòng)器套件帶有一組參考設計 4,旨在為所有希望評估該系統的人士提供一個(gè)起點(diǎn),并且幫助啟動(dòng)任何新的電機控制項目。
參考電路
1. Hill, Tom. ""借助 Matlab 將電機驅動(dòng)遷移到 Zynq SoC 設計中。." Xcell 雜志,87 期,2014 年第二季度
2. O''''''''Sullivan, Dara, Jens Sorensen, 和 Anders Frederiksen. ""閉環(huán)電機控制中基于模型的設計工具." PCIM Europe, 2014.
3. Corradi, Dr. Giulio. ""頻率空間矢量調制—第一部分." 網(wǎng)絡(luò ), 2012 年 10 月 4 日。
4. AD-FMCMOTCON1-EBZ 用戶(hù)指南。
推薦閱讀:


