
【導讀】作為應用工程師,我們經(jīng)常遇到各種有關(guān)差分輸入型高速模數轉換器(ADC)的驅動(dòng)問(wèn)題。事實(shí)上,選擇正確的ADC驅動(dòng)器和配置極具挑 戰性。為了使魯棒性ADC電路設計多少容易些,我們匯編了一套通用"路障"及解決方案。本文假設實(shí)際驅動(dòng)ADC的電路—也被稱(chēng)為ADC 驅動(dòng)器或差分放大器 — 能夠處理高速信號。
引言
大多數現代高性能ADC使用差分輸入抑制共模噪聲和干擾。由于采用了平衡的信號處理方式,這種方法能將動(dòng)態(tài)范圍提高2倍,進(jìn)而改善系統總體性能。雖然差分 輸入型 ADC也能接受單端輸入信號,但只有在輸入差分信號時(shí)才能獲得最佳ADC性能。ADC驅動(dòng)器專(zhuān)門(mén)設計用于提供這種差分信號的電路—可以完成許多重要的功能,包括 幅度調整、單端到差分轉換、緩沖、共模偏置調整和濾波等。自從推出 AD8138,1 以后,差分ADC驅動(dòng)器已經(jīng)成為數據采集系統中不可或缺的信號調理元件。
圖1:差分放大器
圖1是一種基本的完全差分電壓反饋型ADC驅動(dòng)器。這個(gè)圖與傳統運放的反饋電路有兩點(diǎn)區別:差分ADC驅動(dòng)器有一個(gè)額外的輸出端(VON)和一個(gè)額外的輸入端(VOCM) 。當驅動(dòng)器 與差 分 輸入型ADC連接時(shí),這些輸入輸出端可以提供很大的靈活性。
與單 端 輸出相反,差 分ADC驅動(dòng)器產(chǎn)生平衡的差分輸出信號—相對于VOCM—在VOP與VON 之間。這里的P指的是正,N指的是負。VOCM輸入信號控制輸出共模電壓。只要輸入與輸出信號處于規定范圍內,輸 出共模電壓必定等于VOCM輸入端的電壓。負反饋和高開(kāi)環(huán)增益致使放大器輸入端的電壓VA+和VA- 實(shí)質(zhì)上相等。
為了便于后面的討論,需要明確一些定義。如果輸入信號是平衡信號,那么VIP和VIN 相對于某個(gè)公共參考電壓的幅度應該是相等的,相位則相反。當輸入信號是單端信號時(shí),一個(gè)輸入端是固定電壓,另一 個(gè)輸入端的電壓相對這個(gè)輸入端變化。無(wú)論是哪種情況,輸入信號都被定義為 VIP – VIN。
差模輸入電壓VIN, dm和共模輸入電壓VIN, cm的定義見(jiàn)公式1和公式2。
 (1, 2)
(1, 2)雖然這個(gè)共模電壓的定義應用于平衡輸入時(shí)很直觀(guān),但對單端輸入同樣有效。
輸出也有差模和共模兩種,其定義見(jiàn)公式3和公式4。
 (3, 4)
(3, 4)需要注意實(shí)際的輸出共模電壓VOUT, cm和VOCM輸入端之間的差異,這個(gè)差異決定了輸出共模電平。
對差分ADC驅動(dòng)器的分析比對傳統運放的分析要復雜得多。為了簡(jiǎn)化代數表達式,暫且定義兩個(gè)反饋系數β1和β2,見(jiàn)公式5和公式6。
在大多數ADC驅動(dòng)應用中 β1 = β2, 但含有 VIP, VIN, VOCM, 1和2項的 VOUT, dm通用閉環(huán)公式對于了解β失配對性能的影響非常有用。VOUT, dm 的計算見(jiàn)公式7,其中包括了與頻率相關(guān)的放大器有限開(kāi)環(huán)電壓增益A(s)。
 (7)
(7)當 β1 ≠ β2, 差分輸出電壓取決于VOCM—這不是理想的結果,因為 它產(chǎn)生了偏移,并且在差分輸出中有過(guò)大的噪聲。電壓反饋架構的增益帶寬積是常數。有趣的是,增益帶寬積中的增益是兩個(gè)反饋系數平均值的倒數。
當 β1 = β2 ≡ | β, 公式7可以被簡(jiǎn)化為公式8。
 (8)
(8)這個(gè)表達式大家可能更加熟悉。 當 A(s) → ∞. 理想的閉環(huán)增益可以簡(jiǎn)化為RF/RG 增益帶寬乘積公式看起來(lái)也很熟悉,其中的"噪聲增 益 "與傳統運放一樣,等于1/β。
反饋系數匹配的差分ADC驅動(dòng)器的理想閉環(huán)增益見(jiàn)公式9。
 (9)
(9)輸出平衡是差分ADC驅動(dòng)器的一個(gè)重要性能指標,它分兩個(gè)方面:幅度平衡和相位平衡。幅度平衡用于衡量?jì)蓚€(gè)輸出在幅度方面的接近 程度,對于理想放大器來(lái)說(shuō)它們是完全一致的。輸出相位平衡用于衡量?jì)蓚€(gè)輸出的相位差與180°的接近程度。輸出幅度或相位的任何 失衡都會(huì )在輸出信號中產(chǎn)生有害的共模分量。輸出平衡誤差(公式10)是差分輸入信號產(chǎn)生的輸出共模電壓與相同輸入信號產(chǎn)生的輸 出差模電壓的對數比值,單位是dB。
 (10)
(10)內部共模反饋環(huán)路迫使VO U T, cm等于輸入端VOCM的電壓,從而達到完美的輸出平衡。
將輸入端接到ADC驅動(dòng)器
處理高速信號的系統經(jīng)常會(huì )用到ADC驅動(dòng)器。分隔距離超 過(guò)信號波長(cháng)一小段的器件之間必須用具有受控阻抗的電氣傳輸線(xiàn)連接,以避免 破壞信號完整性。當傳輸線(xiàn)的兩端用其特征阻抗端接時(shí)可以取得最佳性能。驅動(dòng)器一般放在靠近ADC的地方,因此在它們之間不要求使 用受控阻抗連接。但到ADC驅動(dòng)器輸入端的引入信號連接通常很長(cháng),必須采用正確電阻端接的受控阻抗連接。
不管是差分還是單端,ADC驅動(dòng)器的輸入阻抗必須大于或等于理想的終端電阻值,以便添加的終端電阻RT能與放大器輸入端并聯(lián)達到 要求的電阻值。本文討論的例子中的所有ADC驅動(dòng)器都設計成具有平衡的反饋比,如圖2所示。
圖2:差分放大器的輸入阻抗
因為兩個(gè)放大器輸入端之間的電壓被負反饋驅動(dòng)到零,因此兩個(gè)輸入端處于連接狀態(tài),差分輸入阻抗RIN就簡(jiǎn)單地等于2×RG。為了匹配傳輸線(xiàn)阻抗 RL,需要將由公式11計算得到的電阻RT跨接在差分輸入端。圖3給出了典型的電阻值,其中 RF = RG = 200 Ω, 理想的 RL, dm = 100 Ω, and RT = 133 Ω.
 (11)
(11)
圖3:匹 配100Ω傳輸線(xiàn)。
單端輸入的端接更加麻煩。圖4描述了采用單端輸入和差分輸出的ADC驅動(dòng)器工作原理。

圖4:采用單端輸入的ADC驅動(dòng)器例子。
雖然輸入是單端的,但 VIN, dm 等于 VIN. 因為電阻RF和RG 是相等和平衡的,因此增益是1,而且差分輸出 VOP – VON, 等于輸入,即 4 V p-p. VOUT, cm = VOCM = 2.5 V ,而且從下方的反饋電路可以看出,輸入電壓 VA+ 和 VA– 等于 VOP/2.
根據公式3和公式4, VOP = VOCM + VIN/2, 即2.5V±1V的同相擺幅; VON = VOCM – VIN/2, 即2.5V±1V的反相擺幅。這樣,VA+ 和 VA– 的擺幅等于 1.25V±0.5V。 The 必須由 VIN 提供的電流交流分量等于 (2 V – 0.5 V)/500 Ω = 3 mA, 因此到地的電阻必須匹配,從 VIN, 看過(guò)去為 667 Ω.
當每個(gè)環(huán)路的反饋系數都匹配時(shí),公式12 就是計算這個(gè)單端輸入電阻的通式,其中RIN, se是單端輸入電阻。
 (12)
(12)這是計算終結電阻的出發(fā)點(diǎn)。然而值得注意的是,放大器增益公式基于零阻抗輸入源的假設。由于存在單端輸入造成的不平衡而必須 加以匹配的重要源阻抗只會(huì )增加上面RG的阻值。為了保持平衡,必須增加下面RG的阻值來(lái)實(shí)現匹配,但這會(huì )影響增益值。
雖然可以為解決端接單端信號問(wèn)題而采用一個(gè)封閉形式的解決方案,但一般使用迭代的方法。在下面的例子中這種需求將變得很明顯。
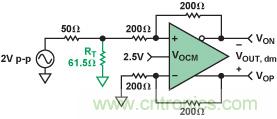
在圖5中,為了保持低的噪聲,要求單端到差分增益為1,輸入終結電阻為50
Ω,反饋和增益電阻值在200Ω
左右。
根據公式12可以算出單端輸入電阻為267Ω
。公式13表明,并聯(lián)電阻RT應等于61.5Ω
,才能將267Ω
輸入電阻減小至50 Ω.

圖5:?jiǎn)味溯斎胱杩?/div>
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)



 (21)
(21)
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
 (26)
(26)
 (27)
(27)
 (28)
(28)
 (29)
(29)
 (30)
(30)
 (31)
(31)
 (32)
(32)


 (33)
(33)
 (34)
(34)
 (35)
(35)
 (36)
(36)
 (37)
(37)


(13)圖6是帶源電阻和終端電阻的電路。帶50
Ω源電阻的源開(kāi)路電壓為2Vp-p。當源用50
Ω端接時(shí),輸入電壓減小到1V p-p,這個(gè)電壓也是單位增益驅動(dòng)器的差分輸出電壓。
圖6:帶源電阻和終端電阻的單端電路。
這個(gè)電路初看起來(lái)非常完整,但不匹配的61.5
Ω電阻與50
Ω的并聯(lián)并增加到了上面的RG電阻,這就改變了增益和單端輸入電阻,并且造成 反饋系數失配。在低增益情況下,輸入電阻的變化很小,暫時(shí)可以忽略,但反饋系數仍然必須匹配。解決這個(gè)問(wèn)題的最簡(jiǎn)單方法是增加下面 RG的阻值。圖7是一種Thévenin等效電路,其中上方的并聯(lián)組合用作源電阻
圖7:輸入源的Thévenin等效電路
有了這種替代方案后,就可以將2 7. 6Ω的電阻RTS 增加到下面的環(huán)路中實(shí)現環(huán)路反饋系數的匹配,如圖8所示。
圖8:平衡的單端端接電路
注意,1.1V p -p的Thévenin電壓要大于1V p-p的正確端接電壓,而每個(gè)增益電阻增加了2 7. 6
Ω,降低了閉環(huán)增益。對于大電阻(>1kΩ
) 和低 增 益(1或2)來(lái)說(shuō)這些相反的效應基本抵消,但對于小電阻或較高增益來(lái)說(shuō)并不能完全抵消。
圖8所示電路現在分析起來(lái)就很容易了,其中的差分輸出電壓可以用公式14計算。
(14)差分輸出電壓并不完全等于理想的1Vp-p,但可以通過(guò)修改反饋電阻實(shí)現最終獨立的增益調整,如公式15所示.
(15)圖9是用標準1%精度電阻實(shí)現的完整電路。
圖9:完整的單端端接電路。
觀(guān)察: 參考圖9,驅動(dòng)器的單端輸入電阻RI N, s e由于RF和RG的改變而變化。驅動(dòng)器上端環(huán)路的增益電阻是200Ω
,下端環(huán)路的電阻是 200 Ω + 28 Ω = 228 Ω 。在不同增益電阻值的情況下計算RI N, s e首先要求計算兩個(gè)β值,見(jiàn)公式16和公式17。
(16) (17)輸入電阻 RIN, se的計算見(jiàn)公式18。
(18)這個(gè)值與原來(lái)計算的267Ω稍有不同,但對RT的計算沒(méi)有顯著(zhù)的影響,因為R IN, se與RT 是并聯(lián)的關(guān)系。
如果需要更精確的總體增益,可以使用更高精度或串聯(lián)的可調電阻。
述的單次迭代方法非常適合閉環(huán)增益為1或2的場(chǎng)合。增益越高,RTS的值越接近RG值,用公式18計算的RIN, se 值與用公式12計算的RIN, se值之間的差異就越大。在這些情況下要求采用多次迭代。
多次迭代并不難實(shí)現:最近ADI公司發(fā)布的可下載的差分放大器計算工具, ADIsimDiffAmp™ (參考文獻2)和 ADI Diff Amp Calculator™(參 考文獻3)足以擔當此任,它們能在幾秒內完成上述計算。
輸入共模電壓范圍
輸入共模電壓范圍(ICMVR)規定了正常工作狀態(tài)下可以施加于差分放大器輸入端的電壓范圍。在這些輸入端上呈現的電壓可以被稱(chēng)為ICMV、 Vacm或VA±。這個(gè)ICMVR指標經(jīng)常被誤解。最常遇到的難題是確 定差分放大器輸入端的實(shí)際電壓,特別是相對于輸入電壓而言。知道變量VIN, cm、 β和VOCM的值后,當β不相等時(shí)使用通式19、當β相等時(shí)使用簡(jiǎn)化公式20就可以計算出放大器的輸入電壓(VA±)。
(19)記住VA始終是按比例縮小的輸入信號,這一點(diǎn)非常有用(見(jiàn)圖4)。不同的放大器類(lèi)型有不同的輸入共模電壓范圍。 ADI公司的高速差分ADC驅動(dòng)器有兩種輸入級配置,即中心型和偏移型。中心型ADC驅動(dòng)器的輸入電壓離每個(gè)電壓軌有約1V的距離(因此叫中心型)。而偏移 型輸入級增加了兩個(gè)晶體管,允許輸入端電壓擺幅更接近–VS軌。圖10是一個(gè)典型差分放大器(Q2和Q3)的簡(jiǎn)化輸入原理圖。
圖10:具有偏移型ICMVR的簡(jiǎn)化差分放大器。
偏移型輸入架構允許差分放大器處理雙極性輸入信號,即使放大器是采用單電源供電,因此這種架構非常適合輸入是地或地電平以下的單電源應用。在輸入端增加的 PNP晶體管(Q1和Q4)可以將差分對的輸入電壓向上偏移一個(gè)晶體管的Vbe電壓 。例如,當-IN端電壓為-0.3V時(shí),A點(diǎn)電壓將為0.7V,允許差分對正常工作。沒(méi)有 PNP(中心型輸入級)時(shí),A點(diǎn)的-0.3V電壓將使NPN差分對處于反向偏置狀態(tài),因而無(wú)法正常工作。
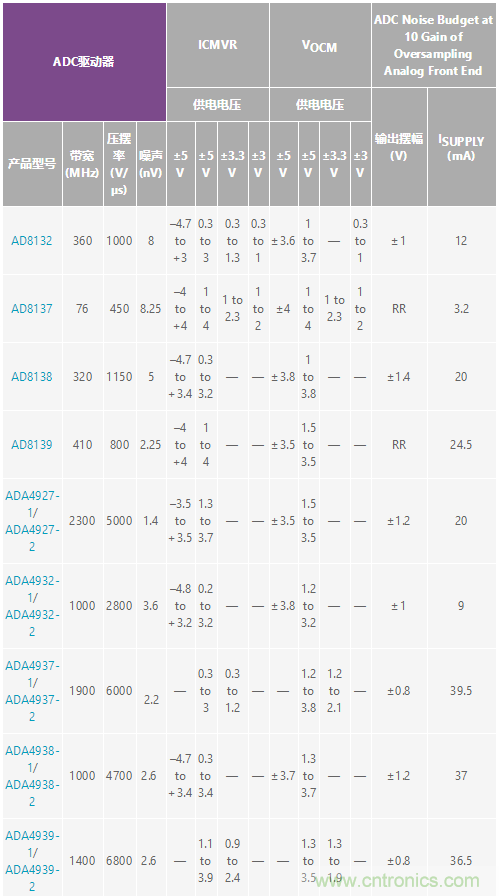
表1提供了ADI公司ADC驅動(dòng)器的多數指標一覽表。對這張表粗略一看就能發(fā)現哪些驅動(dòng)器具有偏移型ICMVR,哪些沒(méi)有。
表1:高速ADC驅動(dòng)器的指標。
輸入和輸出耦合:交流或直流
需要交流耦合還是直流耦合對差分ADC驅動(dòng)器的選擇有很大的影響。輸入和輸出耦合之間的考慮因素也不同
交流耦合型輸入級電路見(jiàn)圖11。
圖11 :交流耦合型ADC驅動(dòng)器。
對于采用交流耦合輸入的差分至差分應用來(lái)說(shuō),放大器輸入端呈現的直流共模電壓等于直流輸出共模電壓,因為直流反饋電流被 輸入電容隔離了。另外,直流反饋系數也是匹配的,完全等于單位1。VOCM—和由此得到的直流輸入共模電壓—經(jīng)常被設置在電源電壓 的一半左右。具有中心型輸入共模范圍的ADC驅動(dòng)器非常適合這類(lèi)應用,它們的輸入共模電壓接近規定范圍的中心。
交流耦合單端至差分應用與對應的差分輸入應用非常相似,但在放大器輸入端具有共模紋波—按比例縮小的輸入信號"復制品"。具 有中心型輸入共模范圍的ADC驅動(dòng)器將平均輸入共模電壓設定在規定范圍的中間,因而能為大多數應用中的紋波提供足夠的富余度。
當輸入耦合方式可選時(shí),值得人們注意的是,采用交流耦合輸入的ADC驅動(dòng)器比采用直流耦合輸入的相似驅動(dòng)器耗散更少的功率,因 為兩個(gè)反饋環(huán)路中都不存在直流共模電流。
當ADC要求輸入共模電壓與驅動(dòng)器輸出端電壓完全不同時(shí),交流耦合ADC驅動(dòng)器的輸出就非常有用。當VOCM值被設在電源電壓一半附 近時(shí),驅動(dòng)器將有最大的輸出擺幅,但當驅動(dòng)要求非常低輸入共模電壓的低電壓ADC時(shí)會(huì )出現問(wèn)題。走出這個(gè)困境的簡(jiǎn)單方法(圖12)是驅動(dòng)器輸出和ADC 輸入之間采用交流耦合連接,從驅動(dòng)器輸出中去除ADC的直流共模電壓,并允許適合ADC的共模電平應用于交流耦合側。例如,驅動(dòng)器可以工作在單5V 電源和 VOCM = 2.5V,條件下,而ADC可以工作在單1.8V電源,此時(shí)在標記為ADC CMV的點(diǎn)必需施加0.9V的輸入共模電壓。
圖 12:采用交流耦合輸出的直流耦合輸入電路
具有偏移型輸入共模范圍的驅動(dòng)器一般最適合工作在單電源直流耦合系統中,這是因為輸出共模電壓通過(guò)反饋環(huán)路實(shí)現了分壓,而且它 的可變分量可以非常接近地,即負電壓軌。當采用單端輸入時(shí),輸入共模電壓由于輸入相關(guān)的紋波而更接近負電壓軌
采用雙電源、單端或差分輸入以及交流或直流耦合的系統通??梢圆捎萌我环N輸入級電路,因為富余度增加了。
表2總結了在輸入耦合和電源的各種組合方式下最常用的ADC驅動(dòng)器輸入級電路類(lèi)型。然而,這些選擇未必總是最好的,應該對每個(gè)系統進(jìn)行具體分析。
表2:耦合和輸入級電路選項
輸出擺幅
為了最大化ADC的動(dòng)態(tài)范圍,應該將它驅動(dòng)到滿(mǎn)輸入范圍。但需要注意:將ADC驅動(dòng)得太厲害可能有損輸入電路,而驅動(dòng)不夠的話(huà)又會(huì )降 低分辨率。將ADC驅動(dòng)到滿(mǎn)輸入范圍并不意味著(zhù)放大器輸出幅度必須達到最大。差分輸出的一個(gè)主要好處是每個(gè)輸出幅度只需達到傳 統單端輸出的一半。驅動(dòng)器輸出可以遠離電源軌,從而減少失真。不過(guò)對單端驅動(dòng)器來(lái)說(shuō)沒(méi)有這個(gè)好處。當驅動(dòng)器輸出電壓接近電壓軌時(shí),放大器將損失線(xiàn)性度,并引入失真。
對于對每一毫伏的輸出電壓都有要求的應用來(lái)說(shuō),表1顯示相當多的ADC驅動(dòng)器能夠提供軌到軌輸出,其典型富余量從幾毫伏到幾百毫伏不等,具體取決于負載
圖 13:采用5V電源的ADA4932在各種頻率下的諧波失真與VOCM的關(guān)系。
圖13是 ADA4932在各種頻率下的諧波失真與 VOCM的關(guān)系圖,是典型輸出擺幅在每個(gè)軌1.2V內(富余量確定的。輸出擺幅是信號的VOCM與VPEAK之和(1V )。值得注意的是,失真在2.8V 以上(3.8 VPEAK或5V往下1.2V)開(kāi)始迅速增加。在低端,失真在2.2V (-1 VPEAK)時(shí)仍很低。同樣的現象還將出現在帶寬和壓擺率的討論中。
噪聲
ADC的非理想特性包括量化噪聲、電子或隨機噪聲和諧波失真。在大多數應用中重要的一點(diǎn)是,噪聲通常是寬帶系統中最重要的性能指標。
所有ADC內部都存在量化噪聲,并且取決于位數n,n越大量化噪聲就越小。因為即使"理想"轉換器也有量化 噪聲,因此量化噪聲可以用作比較隨機噪聲和諧波失真的基準。ADC驅動(dòng)器的輸出噪聲應該接近或低于A(yíng)DC的隨機噪聲和失真。下面先討論 ADC噪聲和失真的特征,然后介紹如何衡量ADC驅動(dòng)器噪聲與ADC性能之間的關(guān)系。
量化噪聲產(chǎn)生的原因是ADC將具有無(wú)限分辨率的模擬信號量化成有限數量的離散值。n位ADC有2n個(gè)二進(jìn)制值。兩個(gè)相鄰值之間的差代 表了可以分辨的最小差值,這個(gè)差值被稱(chēng)為量化等級的最低有效位(L S B),或q。因此一個(gè)量化等級等于轉換器量程的1/2n。如果一個(gè)不 斷變化的電壓經(jīng)過(guò)一個(gè)完美的n位ADC轉換,然后轉換回模擬信號,再從ADC輸入中減去這個(gè)信號,那么差值看起來(lái)就像噪聲。它有一個(gè) 公式21計算所得有效值(rms):
從這里可以得出n位ADC在其奈奎斯待帶寬上的信號與量化噪聲比的對數(dB)公式22,這也是n位轉換器所能取得的最佳信噪比(SNR)。
ADC中的隨機噪聲 包含了熱噪聲、散粒噪聲和閃爍噪聲,一般要大于量化噪聲。由于A(yíng)DC的非線(xiàn)性產(chǎn)生的 諧波失真會(huì )在輸出信號中產(chǎn)生 與輸入信號諧波有關(guān)的有害信號。 總的諧波失真和噪聲 (THD + N)是一個(gè)重要的ADC性能參數,它衡量了電子噪聲和諧波失真與接近ADC滿(mǎn) 量程輸入范圍的模擬輸入信號之間的關(guān)系。電子噪聲積分的帶寬包括了所要考慮的最后一個(gè)諧波頻率。THD中的"T"(ttotal,總和)包括了前五個(gè)諧波失真分量,是連同噪聲一起的和的平方根,見(jiàn)公式23。
(23)公式23中的v1是輸入信號,v2到v6是前五個(gè)諧波失真分量, vn是ADC的電子噪聲。
T HD+噪聲)的倒數被稱(chēng)為信號與噪聲失真比,簡(jiǎn)稱(chēng)SINAD,通常用dB表示,見(jiàn)公式24。
(24)如果SINAD被信號與量化噪聲比代替(公式22),我們就能定義轉換器具有的有效位數(ENOB),前提是這個(gè)轉換器的信號與量化噪聲比與SINAD相同(公式25)。
ENOB也能用SINAD項表達,見(jiàn)公式26。
(26)ENOB可以用來(lái)比較ADC驅動(dòng)器的噪聲性能和ADC的噪聲性能,進(jìn)而判斷是否適合驅動(dòng)這個(gè)ADC。圖14是一個(gè)差分ADC噪聲模型。
圖 14:差分ADC驅動(dòng)器的噪聲模型
公式27表明了通常情況下當 β1 = β2 ≡ β時(shí),八個(gè)噪聲源中每個(gè)源對總輸出噪聲密度的貢獻。
(27)總輸出噪聲電壓密度vno, dm是通過(guò)計算這些分量的和平方根得到的。將這些公式輸入電子表格是計算總輸出噪聲電壓密度的最好方式。 ADI公司網(wǎng)站上還新推出了ADI差分放大器計算器(參考文獻3),用它能快速計算噪聲、增益和差分ADC驅動(dòng)器的其它參數值。
現在可以將ADC驅動(dòng)器的噪聲性能與ADC的ENOB作一比較。描述這一過(guò)程的例子是為采用5V電源工作的 AD9445 ADC選擇和評估一款增益為2、2V 滿(mǎn)量程輸入的差分驅動(dòng)器。它能處理用一個(gè)單極點(diǎn)濾波器限制、占用50M H z(-3d B)帶寬的直接耦合寬帶信號。從數據手冊中記載的各種條件下的 ENOB參數列表中可以發(fā)現:對應50MHz的奈奎斯特帶寬,ENOB=12位。
ADA4939 是一款能夠被直接耦合的高性能寬帶差分ADC驅動(dòng)器。在 噪聲性能方面它是驅動(dòng)AD9445的合適產(chǎn)品嗎?A DA4939數據手冊針對近似為2的差分增益推薦的RF=402?
、RG=200?
,數據手冊給出的 這種情況下的總輸出電壓噪聲密度為9.7nV/Hz。
首先計算給定恒定輸入噪聲功率譜密度下的系統噪聲帶寬BN,它是輸出與決定系統帶寬的實(shí)際濾波器相同噪聲功率的等效矩形低通濾波器的帶寬。對于一個(gè)單極濾波,BN等于π/2乘以3dB帶寬,如公式28所示。
(28)然后在系統帶寬的平方根內對噪聲密度進(jìn)行積分,得到輸出噪聲有效值(公式29)。
假定噪聲幅度呈高斯分布,那么峰峰值噪聲的計算可以使用常見(jiàn)的±3σ門(mén)限(在99.7%的時(shí)間內噪聲電壓擺幅位于這些門(mén)限之間),見(jiàn)公式30:
現在可以在12位ENOB、2V滿(mǎn)量程輸入范圍基礎上對驅動(dòng)器的峰峰輸出噪聲和AD9445 LSB的1 LSB電壓進(jìn)行比較,其中LSB的計算見(jiàn)公式31。
(31)相對于12位ENOB,驅動(dòng)器的峰峰輸出噪聲與ADC的LSB具有可比性。因此從噪聲角度看,A DA4939驅動(dòng)器非常適合這種應用。最終還必須通過(guò)搭建和測試驅動(dòng)器/ADC組合作出決定。
電源電壓
考慮電源電壓和電流是縮小ADC驅動(dòng)器選擇范圍的快速途徑。表1提供了不同電源電壓下ADC驅動(dòng)器性能的快速查找表。電源電壓會(huì )影響帶寬、信號擺幅和ICMVR 。衡量這些指標并進(jìn)行反復權衡對差分放大器的選擇而言至關(guān)重要。
電源抑制 (PSR)是另外一個(gè)重要的參數。作為放大器輸入的電源引腳的作用經(jīng)常被人忽視。電源線(xiàn)上或耦合進(jìn)電源線(xiàn)的任何噪聲對輸出信號都有潛在的破壞作用。
考慮ADA4937-1的電源線(xiàn)上存在60MHz、50mVp-p的噪聲這樣一個(gè)例子。它的PSR在50MHz時(shí)是-70dB,這意味著(zhù)電源線(xiàn)上的噪聲在放大器 輸出端將被減少到約16μV。在1V滿(mǎn)量程輸入的16位系統中,1 LSB是15.3μV,因此電源線(xiàn)上的這個(gè)噪聲將"淹沒(méi)"LSB。
這種情況可以通過(guò)增加串聯(lián)表貼鐵氧體磁珠L(cháng)1/ L 2和并聯(lián)旁路電容C1/C2(圖15)加以改進(jìn)。
圖 15:電源旁路電路
在50MHz時(shí),磁珠的阻抗是60?
,10nF(0.01μF)電容的阻抗是0.32?
,由這兩種元件組成的衰減器可以提供45.5dB的衰減(公式32)
上述分壓式衰減加上-70d B的PSR總共可提供115d B的抑制效果,因而可將噪聲減小到遠低于1 LSB的90nVp-p左右。
諧波失真
頻域中的低諧波失真在窄帶和寬帶系統中都很重要。驅動(dòng)器中的非線(xiàn)性會(huì )在放大器輸出端產(chǎn)生單頻諧波失真和多頻互調失真。
在噪聲分析例子中使用的方法可以同樣應用于失真分析,即對ADA4939的諧波失真與2V滿(mǎn)量程輸出時(shí)AD 94 45 12位ENOB的1 LSB進(jìn)行比較。一個(gè)ENOB LSB在噪聲分析中代表488μV。
The distortion data in the ADA4939 specification table is given for a gain of 2, comparing 2nd and 3rd harmonics at various frequencies. Table 3 shows the harmonic distortion data for a gain of 2 and differential output swing of 2 V p-p.
表3:ADA4939的二次和三次諧波失真
這些數據表明,諧波失真隨頻率增加而增加,并且在感興趣帶寬(50M Hz)內二次諧波失真要比三次諧波失真糟糕。在比感興趣頻率更 高的頻率點(diǎn)的諧波失真值較高,因此它們的幅度可能被系統頻帶限制功能所降低。如果系統有一個(gè)50MHz的磚墻式濾波器,那么就只需要考慮超過(guò)25MHz 的頻率點(diǎn),因為更高頻率的所有諧波將被濾波器濾除。盡管如此,我們還是要評估頻率最高為50MHz的系統,因為目 前的所有濾波器對諧波的抑制可能都不夠,失真分量可能混疊回信號帶寬內。圖16給出了ADA4939在各種電源電壓和2Vp-p輸出時(shí)的諧波失真與頻率的關(guān)系。
圖 16:諧波失真與頻率的關(guān)系
50MHz時(shí)的二次諧波失真相對于2Vp-p輸入信號來(lái)說(shuō)大約是-88dBc。為了比較諧波失真水平和1 ENOB LSB,這個(gè)諧波失真值必須被轉換成電壓值,如公式33所示。
(33)這個(gè)失真值只有80μVp-p,或1 ENOB LSB的16%。因此,從失真的角度看,可以認為ADA4939是AD9445 ADC驅動(dòng)器的很好選擇。
由于A(yíng)DC驅動(dòng)器是負反饋放大器,輸出失真取決于放大器電路中的環(huán)路增益值。負反饋放大器固有的開(kāi)環(huán)失真將被減少 1/(1+L G)倍,其中LG代表可用環(huán)路增益。
放大器的輸入(誤差電壓)被乘以一個(gè)大的前向電壓增益A(s),然后通過(guò)反饋系數β傳送到輸入端,再通過(guò)調整輸出使誤差最小。這樣, 這類(lèi)放大器的環(huán)路增益為A(s)×β。隨著(zhù)環(huán)路增益(A(s), β或兩者)的降低,諧波失真將增加。電壓反饋放大器,如積分器,被設計在直流 和低頻率處具有大的A(s),然后隨著(zhù)1/f在規定高頻點(diǎn)趨向于1而發(fā)生滾降。隨著(zhù)A(s)的滾降,環(huán)路增益下降,失真增加。因此諧波失真參數是A(s)的倒數。
電流反饋放大器將誤差電流用作反饋信號。誤差電流被乘以一個(gè)大的前向互阻T(s)而轉換成輸出電壓,然后通過(guò)反饋系數 1/R F將輸出電壓轉換成反饋電流,以便使輸入誤差電流最小。因此理想的電流反 饋放大器的環(huán)路增益是 T(s) × (1/RF) = T(s)/RF。 同 A(s)一樣, T(s)也有一個(gè) 大的直流值,并隨著(zhù)頻率的增加而滾降,從而降低環(huán)路增益,增加諧波失真。
環(huán)路增益還直接取決于反饋系數1/RF。理想電流反饋放大器的環(huán)路增益并不取決于閉環(huán)電壓增益,因此諧波性能不會(huì )隨著(zhù)閉環(huán)增益 的增加而下降。在實(shí)際的電流反饋放大器中,環(huán)路增益確實(shí)某種程度上取決于閉環(huán)增益,但不會(huì )達到電壓反饋放大器中那樣的程度。 因此對于高閉環(huán)增益和低失真的應用來(lái)說(shuō),電流反饋放大器,比如 ADA4927, 是比電壓反饋放大器更好的選擇。從圖17可以看出隨著(zhù)閉環(huán)增益的增加失真性能保持得有多好。
圖 17:失真與頻率和增益的關(guān)系
帶寬和壓擺率
帶寬和壓擺率在A(yíng)DC驅動(dòng)器應用中特別重要。一般情況下,器件的帶寬是指小信號帶寬,而壓擺率衡量的是大信號擺幅時(shí)放大器輸出端的最大變化率。
EUBW(有效可用帶寬) , 一 個(gè)類(lèi)似于ENOB(有效位數)的首字母縮略詞,用于描述帶寬。許多ADC驅動(dòng)器和運放自稱(chēng)有很寬的帶寬指標, 但并不是所有帶寬都是可用的。例如,-3dB帶寬是測量帶寬的一種傳統方法,但它并不意味著(zhù)所有帶寬是可用的。-3dB帶寬的幅度和 相位誤差的使用比實(shí)際"截止"頻率要早十年。那么什么是放大器的EUBW?如何確定它的大???確定可用帶寬的一個(gè)極好方法是查詢(xún)數據手冊上的失真圖。
圖18表明,為了使二次和三次諧波保持大于-80dBc,這個(gè)ADC驅動(dòng)器不應用于超過(guò)60MHz的頻率。由于每個(gè)應用都不盡相同,系統要求將 成為具有足夠帶寬和足夠失真性能的合適驅動(dòng)器的選擇準則。
圖 18:ADA4937電流反饋型ADC驅動(dòng)器的失真曲線(xiàn)
壓擺率,一種大信號參數,指的是放大器輸出在沒(méi)有過(guò)高失真的情況下能夠跟蹤輸入的最大變化率。以壓擺率考慮正弦波輸出
公式34在過(guò)零點(diǎn)的導數(變化率)即最大變化率,它等于:
(35)其中 dv/dt max是壓擺率,Vp是峰值電壓,f等于滿(mǎn)功率帶寬(FPBW)。推算FPBW:
(36)因此,在選擇ADC驅動(dòng)器時(shí),重點(diǎn)要考慮增益、帶寬和壓擺率(FPBW),以確定放大器是否足夠滿(mǎn)足應用要求。
穩定性
關(guān)于差分ADC驅動(dòng)器的穩定性考慮與運放是一樣的,關(guān)鍵參數是相位余量。雖然特定放大器配置的相位余量可以從數據手冊中獲取, 但在實(shí)際系統中由于PCB版圖中的寄生效應這個(gè)相位余量會(huì )有顯著(zhù)降低。
負電壓反饋放大器的穩定性取決于其環(huán)路增益的大小和符號, A(s) × β. 差分ADC驅動(dòng)器要比典型的運放電路稍微復雜一點(diǎn),因為它 有兩個(gè)反饋系數。在公式7和公式8的分母中可以見(jiàn)到環(huán)路增益。公式37提供了在反饋系數不匹配(β1 ≠ β2)情況下的環(huán)路增益。
(37)當反饋系數不匹配時(shí),有效反饋系數是兩個(gè)反饋系數的簡(jiǎn)單平均值。當它們匹配并被定義為β時(shí),環(huán)路增益可以簡(jiǎn)化為 A(s) × β.
要想使反饋放大器穩定,其環(huán)路增益不允許等于-1(相當于相位偏移-180°、幅度為1)。對于電壓反饋放大器來(lái)說(shuō),其開(kāi)環(huán)增益頻率圖上環(huán)路增益 值等于1(即0dB)的點(diǎn)正是A(s)值等于反饋系數倒數的地方。對于基本的放大器應用,反饋是純阻性的,在反饋環(huán)路中不會(huì )引入 相位偏移。在反饋系數匹配的情況下,與頻率無(wú)關(guān)的反饋系數倒數 1 + RF/RG通常被稱(chēng)為噪聲增益。 如果將以 dB為單位的恒定噪聲增益與開(kāi)環(huán)增益A(s)繪制在同一張圖上,那么兩條曲線(xiàn)的交叉點(diǎn)就是環(huán)路增益為1或0dB的地方。在這個(gè)頻率點(diǎn)的A(s) 相位與-180°之間的差值被定義為相位余量。為了穩定工作,這個(gè)相位余量應大于或等于45°。圖19給出了 RF/RG = 1 (噪聲增益 =2)時(shí)A DA4932的單位環(huán)路增益點(diǎn)和相位余量。
圖19:ADA4932開(kāi)環(huán)增益幅度和相位與頻率的關(guān)系
進(jìn)一步觀(guān)察圖19可以發(fā)現,A DA4932在噪聲增益為1(每個(gè)環(huán)路中100%反饋)時(shí)有約50°的相位余量。雖然讓ADC驅動(dòng)器工作在零增益有點(diǎn)不切實(shí)際,但這一結果表明,A DA4932可以穩定工作在小數差分增益(如RF/RG=0.25,噪聲增益=1.25 )。并不是所有差 分ADC驅動(dòng)器都能這樣。最小穩定增益可以在所有ADC驅動(dòng)器的數據手冊中找到。
電流反饋ADC驅動(dòng)器的相位增益同樣可以從開(kāi)環(huán)響應中判斷。電流反饋放大器不再使用前向增益A(s),而是 使 用前向互阻T(s),并 將誤 差電流用作反饋信號。帶匹配反饋電阻的電流反饋驅動(dòng)器的環(huán)路增益等于T(s)/RF,因此電流反饋放大器環(huán)路增益幅度在T(s)=RF時(shí)等于1(即0dB)。這個(gè)點(diǎn)在開(kāi)環(huán)互阻和相位圖上很容易找到,定位方法與電壓反饋放大器相同。注意,繪制電阻與1k?的比值能使阻值表示在對數圖上。圖20給出了RF=300
時(shí)A DA4927電流反饋差分ADC驅動(dòng)器的單位環(huán)路增益點(diǎn)和相位余量。
圖20:ADA4927開(kāi)環(huán)增益幅度和相位與頻率的關(guān)系
300 ?反饋電阻水平線(xiàn)與互阻幅度曲線(xiàn)的交叉點(diǎn)是環(huán)路增益為0dB的地方。在 這個(gè)頻率點(diǎn),T(s)的相位接近-13 5°,因此 有45°的相位余量。相位余量和穩定性隨RF的增加而增加,隨RF的減小而減小。電流反饋放大器應始終使用具有足夠相位余量的純電阻反饋
PCB版圖
在穩定的ADC驅動(dòng)器設計好后,還必須在PCB上實(shí)現。由于電路板存在寄生成分,總是會(huì )損失一些相位余量,因此電路板的寄生效應必 須保持最小,其中特別要關(guān)注的是負載電容、反饋環(huán)路電感和求和節點(diǎn)電容。每種寄生電抗都會(huì )給反饋環(huán)路增加遲滯性相位偏移,從而減小相位余量。由于 PCB版圖設計不良可能導致20°以上的相位余量損失。
在使用電壓反饋放大器時(shí)最好使用盡可能小的RF,以便最小化由 RF和求和節點(diǎn)電容組成的極點(diǎn)引起的相位偏移。如果要求使用大的RF,寄生電容可以用跨接每個(gè)反饋電阻的小電容CF進(jìn)行補償,對CF的要求是RFCF等于RG乘以求和節點(diǎn)電容。
PCB版圖是設計中最后的必要步驟之一。遺憾的是,它也是設計中最容易被忽視的步驟之一,即使性能高度依賴(lài)于版圖設計的高速電路 也是如此。馬虎或拙劣的版圖設計可能降低一個(gè)高性能設計的性能,甚至使它不能工作。雖然本文無(wú)法涵蓋正確高速PCB 設計的所有方面,但還是要介紹一些關(guān)鍵點(diǎn)。
寄生成分將損害高速電路的性能。寄生電容是由元器件的焊盤(pán)、走線(xiàn)、地平面或電源平面引起的。沒(méi)有地平面的長(cháng)走線(xiàn)將形成寄生電 感,進(jìn)而導致瞬態(tài)響應中的振鈴和其它不穩定現象。寄生電容在放大器的求和節點(diǎn)處特別危險,因為它會(huì )在反饋?lái)憫幸胍粋€(gè)極點(diǎn), 造成尖峰和不穩定。一種解決方案是確保ADC驅動(dòng)器安裝和反饋元件焊盤(pán)下方區域的所有電路板層都是干凈的地和電源平面。
要使有害寄生電抗最小,首先要使所有走線(xiàn)盡可能短。RF-4印制板的外層50?
走線(xiàn)產(chǎn)生的寄生參數大約為2.8p F/英寸和7n H/英寸。內層50?
走線(xiàn)的寄生電抗將在此基礎上增加約30%。還要確保在長(cháng)走線(xiàn)下方有地平面,以使走線(xiàn)電感最小。保持短小的走線(xiàn)有助于減小寄生電容和寄生電感—并保持設計的完整性。
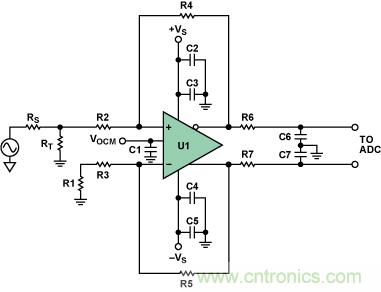
電源旁路是版圖設計中另一個(gè)重要的考慮因素。確保電源旁路電容和VOCM旁路電容盡可能靠近放大器引腳放置。另外,在電源上使用 多個(gè)旁路電容有助于確保為寬帶噪聲提供低阻抗路徑。圖21給出了一個(gè)帶旁路和輸出低通濾波器的典型差分放大器原理圖。低通濾波 器用于限制進(jìn)入ADC的帶寬和噪聲。理想情況下,電源旁路電容回路靠近負載回路,這有助于減小地平面中的環(huán)流,從而改善ADC驅動(dòng) 器性能(圖22a和圖22b)。
圖21 :帶電源旁路電路和輸出低通濾波器的ADC驅動(dòng)器
使用地平面和一般的接地技巧是一個(gè)具體而復雜的課題,不在本文討論的范圍之內。不過(guò)有幾個(gè)要點(diǎn)需要指出,見(jiàn)圖22a和圖22b。首先,只在一個(gè)點(diǎn)將模擬和數字地連接在一起,記住只是單點(diǎn)接地。這樣做可以使地平面中模擬和數字電流的交互作用最小,而這種交互最終將導致系統中產(chǎn)生"噪聲"。另外,要將模擬電源終接到模擬電源 平面,數字電源終接到數字電源平面。對于混合信號IC,要將模擬回路終接到模擬地平面,將數字地回路終接到數字地平面。
圖23:混合信號的接地方式
Figure 23. Mixed-signal grounding.
有關(guān)高速PCB版圖設計的詳細討論請參考 A Practical Guide to High-Speed Printed-Circuit-Board Layout3 。
我們希望當您用ADC驅動(dòng)器進(jìn)行設計時(shí)這里提供的材料有助于您更加全面地考慮眾多必要因素。理解差分放大器—并在項目開(kāi)始時(shí)就留意ADC驅動(dòng)器設計的細節—將使設計過(guò)程中發(fā)生的問(wèn)題最少,并使您遠離ADC驅動(dòng)器故障。
參考電路
1有關(guān)ADI公司的所有器件信息,請訪(fǎng)問(wèn) www.analog.com.
2www.analog.com/en/design-center/interactive-design-tools/adi-diffampcalc.html.
3www.analog.com/en/analog-dialogue/articles/high-speed-printed-circuit-board-layout.html.
推薦閱讀:




